Signification des témoins lumineux
De nombreux composants du système de contrôle FRC® disposent de voyants lumineux qui peuvent être utilisés pour diagnostiquer rapidement les problèmes avec votre robot. Ce guide présente chacun des composants matériels et décrit la signification des voyants. Photos et informations d’Innovation FIRST et Cross the Road Electronics.
A compact and printable Status Light Quick Reference is available.
Témoin diagnostique (RSL)

Allumé |
Robot alimenté et désactivé |
Allumé clignotant |
Robot alimenté et activé |
Éteint |
Robot non alimenté, roboRIO non alimenté ou RSL mal câblée |
roboRIO

Power |
Vert |
Alimentation OK |
|
Ambre |
Protection contre les sous-tensions déclenchée, sorties désactivées |
||
Rouge |
Faute d’alimentation, vérifier les connexions pour un court-circuit |
||
Status |
Allumée pendant que le contrôleur démarre, devrait s’éteindre ensuite |
||
2 clignotements |
Erreur logicielle, ré-imager le roboRIO |
||
3 clignotements |
Mode sans échec, redémarrer le roboRIO, ré-imager si ce n’est pas résolu |
||
4 clignotements |
Le logiciel a planté deux fois sans redémarrer, redémarrer le roboRIO, ré-imager si ce n’est pas résolu |
||
Clignotement constant ou reste allumée |
Erreur irrécupérable |
||
Radio |
N’est pas implémenté pour le moment |
||
Comm |
Éteint |
Aucune communication |
|
Rouge |
Communication avec le Driver Station, mais pas de code utilisateur en cours d’exécution |
||
Rouge clignotant |
Arrêt d’urgence déclenché |
||
Vert |
Bonne communication avec le Driver Station |
||
Mode |
Éteint |
Sorties désactivées (robot désactivé, sous-tension, etc.) |
|
Orange |
Autonome activé |
||
Vert |
Téléopération activée |
||
Rouge |
Test activé |
||
RSL |
|||
Vivid-Hosting VH-109 Radio

Power |
Vert |
Allumée ou en démarrage |
Éteint |
No Power |
|
System Status |
Vert |
Able to ping the field |
Blinking (1Hz) |
Unable to ping the field |
|
Blinking (20Hz) |
Firmware being flashed |
|
Blinking (50Hz) |
Performing « first boot » |
|
Éteint |
Booting Up |
|
2.4 GHz |
Vert |
Wifi available |
Blinking (20Hz) Sys Blinking |
Battery detected, Wireless is disabled |
|
6 GHz |
Solid Blue |
6 GHz connection made |
Blinking (20Hz) Sys Blinking |
Battery detected, Wireless is disabled |
Panneau de distribution de puissance (PDP)

Témoins Status/Comm du PDP
Témoin |
Clignotant |
Lent |
|---|---|---|
Vert |
Aucune erreur - robot activé |
Aucune erreur - robot désactivé |
Orange |
N/A |
Erreur |
Rouge |
N/A |
Aucune communication CAN |
Astuce
Si un indicateur du PDP affiche plus d’une couleur, voir le tableau des états particuliers des témoins du PDP ci-dessous. Pour plus d’informations sur la résolution des problèmes avec le PDP, consulter le manuel utilisateur du PDP.
Note
Note that the No CAN Comm fault will occur if the PDP cannot communicate with the roboRIO via CAN Bus.
États particuliers des témoins du PDP
Couleurs des témoins |
Problème |
|---|---|
Rouge/orange |
Matériel endommagé |
Vert/orange |
En démarrage |
Aucun témoin |
Aucune alimentation/polarité incorrecte |
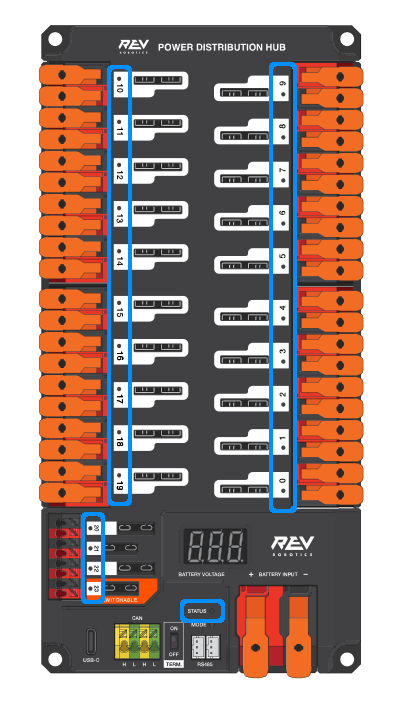
Concentrateur de distribution d’alimentation
Note
Ces modèles de voyants ne s’appliquent qu’à la version 21.1.7 et ultérieure du micrologiciel
Voyant d’état PDH
Couleur de la DEL |
Statut |
|---|---|
Bleu |
Appareil allumé mais aucune communication établie |
Vert |
Communication principale avec roboRIO établie |
Magenta clignotant |
Délai d’attente de maintien en vie |
Turquoise |
Heartbeat secondaire (connecté au client matériel REV) |
Clignotant Orange/Bleu |
Faible batterie |
Clignotant Orange/Jaune |
Erreur sur le bus CAN |
Clignotant Orange/Turquoise |
Faute du Matériel |
Clignotant Orange/Rouge |
Fail Safe |
Clignotant Orange/Magenta |
Erreur de surintensité de courant |
DELs pour canaux
Couleur de la DEL |
Statut |
|---|---|
Éteint |
Le canal est sous tension et fonctionne comme prévu |
Rouge |
Le canal n’a PAS de tension et il y a un défaut actif. Vérifiez s’il y a un disjoncteur/fusible déclenché ou manquant |
Rouge clignotant |
Défaut persistant sur le canal. Vérifiez s’il y a un disjoncteur/fusible déclenché. |
Régulateur de tension (VRM)

Les témoins sur le VRM indiquent l’état des deux alimentations électriques. Si les alimentations fonctionnent de manière adéquate, les deux témoins devraient être allumés en vert. Si les témoins sont faibles ou éteints, la sortie pourrait avoir un court-circuit ou tirer trop de courant.
Module de contrôle pneumatique (PCM)

Témoin du PCM
Témoin |
Clignotant |
Lent |
Long |
|---|---|---|---|
Vert |
Aucune erreur - robot activé |
Erreur |
N/A |
Orange |
N/A |
Erreur |
N/A |
Rouge |
N/A |
Aucune communication CAN ou erreur d’un solénoïde (la lumière propre au solénoïde clignotera) |
Erreur du compresseur |
Astuce
Si un indicateur du PCM affiche plus d’une couleur, voir le tableau des états particuliers des témoins du PCM ci-dessous. Pour plus d’informations sur la résolution des problèmes avec le PCM, consulter le manuel utilisateur du PCM.
Note
Noter que l’erreur No CAN Comm ou Aucune communication CAN ne s’affichera pas si le PCM ne peut communiquer avec aucune autre composante, si le PCM et le PDP peuvent communiquer entre eux, mais pas le roboRIO
États particuliers des témoins du PCM
Témoin |
Problèmes |
|---|---|
Rouge/orange |
Matériel endommagé |
Vert/orange |
En démarrage |
Aucun témoin |
Pas d’alimentation/polarité incorecte |
Témoin Comp du PCM
Ce témoin est le témoin du compresseur. Celui-ci sera vert lorsque la sortie du compresseur est active (compresseur alimenté) et éteint lorsque la sortie du compresseur n’est pas active
Témoins des canaux solénoïdes du PCM
Ces témoins sont allumés rouge si le canal du solénoïde est alimenté et éteints s’il n’est pas alimenté.
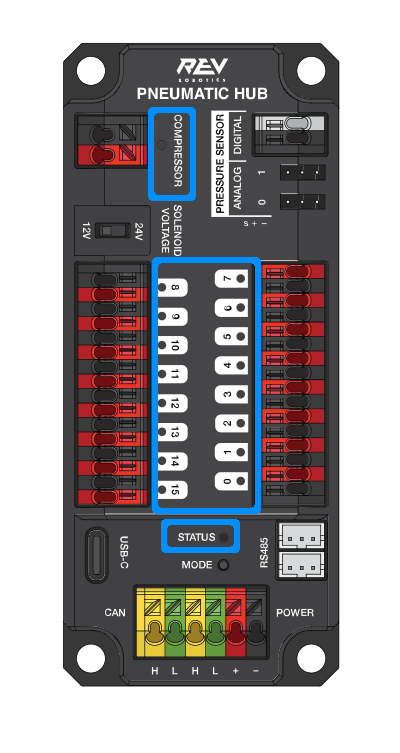
Concentrateur pneumatique
Note
Ces modèles de voyants ne s’appliquent qu’à la version 21.1.7 et ultérieure du micrologiciel
Pneumatic Hub Status LED
Couleur de la DEL |
Statut |
|---|---|
Bleu |
Appareil allumé mais aucune communication établie |
Vert |
Communication principale établie |
Magenta clignotant |
Délai d’attente de maintien en vie |
Turquoise |
Heartbeat secondaire (connecté au client REV HW) |
Clignotant Orange/Bleu |
Faute du Matériel |
Clignotant Orange/Jaune |
Erreur sur le bus CAN |
Clignotant Orange/Rouge |
Fail Safe |
Clignotant Orange/Magenta |
Erreur de surintensité de courant |
Clignotant Orange/Vert |
Compressor Over Current |
DEL du compresseur
Couleur de la DEL |
Statut |
|---|---|
Vert |
Compresseur activé |
Noire |
Compresseur arrêté |
DEL du solénoïde
Couleur de la DEL |
Statut |
|---|---|
Vert |
Solénoïde activé |
Noire |
Solénoïde désactivé |
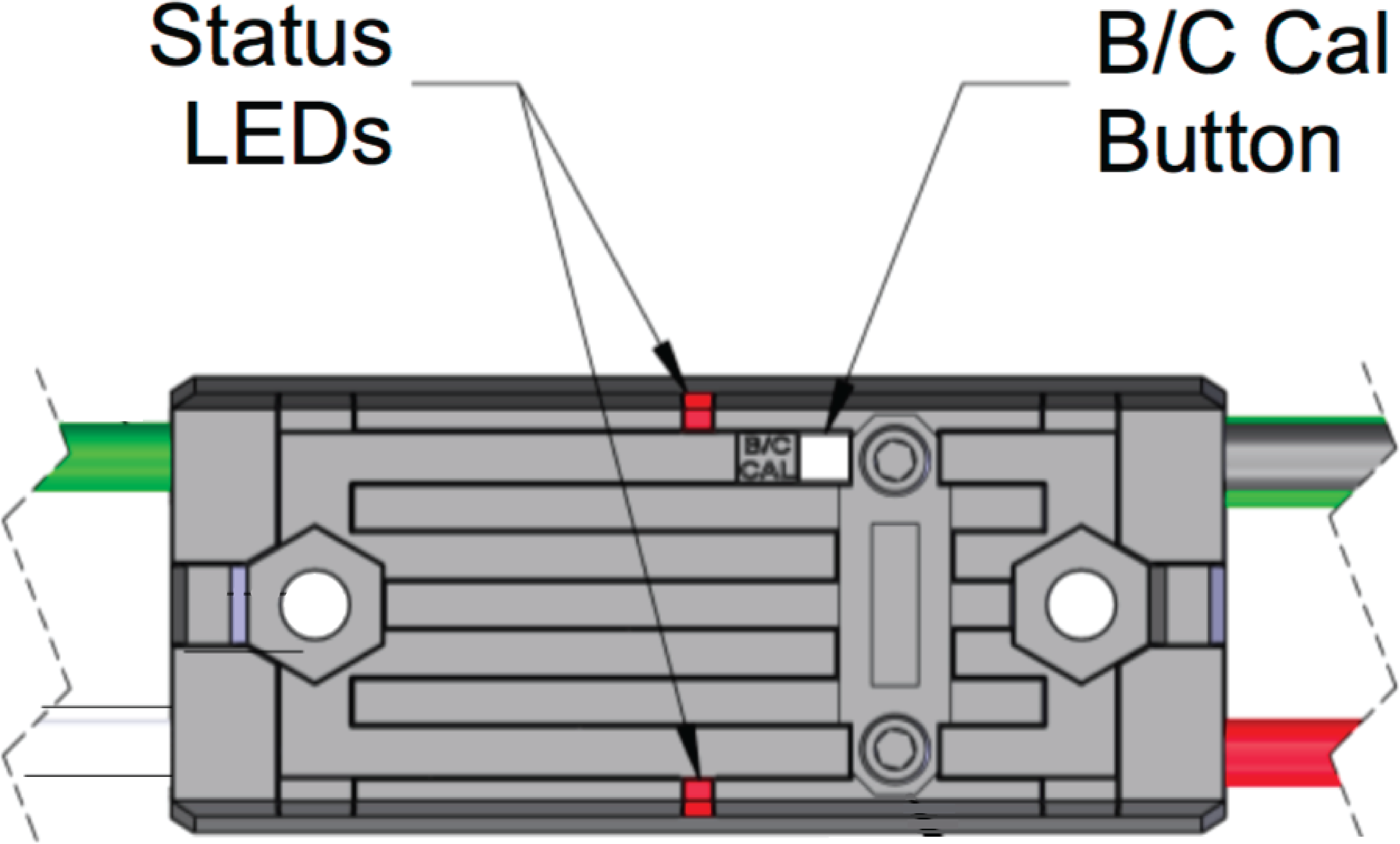
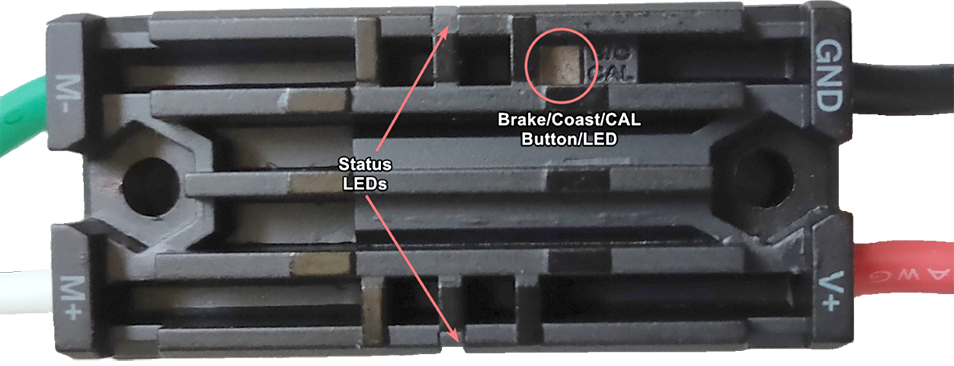
Talon SRX & Victor SPX Motor Controllers
These motor controllers use Phoenix 5. For the most up-to-date information, see the CTRE Phoenix 5 Documentation.
Talon SRX/Victor SPX Status LEDs During Normal Operation
Témoins |
Couleurs |
Device State |
|---|---|---|
Les deux |
Vert clignotant |
Signal positif appliqué. Vitesse du clignotement proportionnelle au rapport cyclique. |
Les deux |
Rouge clignotant |
Signal négatif appliqué. Vitesse du clignotement proportionnelle au rapport cyclique. |
Aucun |
Aucun |
No power is being applied |
En alternance |
Éteint/orange |
Bus CAN détecté, robot désactivé |
En alternance |
Éteint/rouge lent |
Bus CAN/PWM non-détecté |
En alternance |
Éteint/rouge rapide |
Erreur détectée |
En alternance |
Rouge/orange |
Matériel endommagé |
Témoins clignotant vers (M-) |
Éteint/rouge |
Interrupteur de fin de course avant ou limite logicielle avant |
Témoins clignotant vers (M+) |
Éteint/rouge |
Interrupteur de fin de course arrière ou limite logicielle arrière |
Témoin 1 seulement (plus près de M+/V+) |
Vert/orange |
En démarrage |
Talon SRX/Victor SPX Status LEDs During Calibration
Témoins |
Device State |
|---|---|
Rouge et vert clignotant |
Mode de calibration |
Vert clignotant |
Calibration effectuée avec succès |
Rouge clignotant |
Calibration échouée |
Talon SRX/Victor SPX B/C CAL Blink Codes
Couleur du témoin B/C CAL |
Device State |
|---|---|
Rouge |
Mode frein |
Éteint |
Mode roue libre |
Talon FX Motor Controller
The Talon FX uses Phoenix 6. For the most up-to-date information, see the CTRE Phoenix 6 Documentation.
Talon FX Status LEDs
État des témoins |
Meaning |
|---|---|
LEDs Off |
No Power |
Blinking Alternating Red |
No valid CAN/PWM signal |
Blinking Alternating Orange |
CAN detected but no Phoenix running |
Blinking Simultaneous Orange |
Valid CAN signal, device disabled |
Both Solid Orange |
Enabled with neutral output |
Blinking Simultaneous Red |
Driving in reverse |
Blinking Simultaneous Green |
Driving forward |
Offset Alternating Red/Off |
Device limit reached |
Offset Orange/Off |
Thermal cutoff |
Alternate Red/Green |
Pro-only command while unlicensed |
Alternate Red/Orange |
Matériel endommagé |
Single LED alternates Green/Orange |
Device in bootloader |
Talon FX B/C CAL Blink Codes
Couleur du témoin B/C CAL |
Device State |
|---|---|
Rouge |
Mode frein |
Éteint |
Mode roue libre |
Contrôleur de moteur SPARK-MAX

SPARK (REV Robotics)

Contrôleur de moteur Victor-SP
Bouton/témoin frein/roue libre/cal - rouge si le contrôleur est en mode frein, éteint si le contrôleur est en mode roue libre
Statut
Vert |
Solide |
Avant (pleine puissance) |
Allumé clignotant |
Proportionnel au voltage de sortie (avant) |
|
Rouge |
Solide |
Arrière (pleine puissance) |
Allumé clignotant |
Proportionnel au voltage de sortie (avant) |
|
Orange |
Solide |
Robot FRC désactivé, signal PWM perdu ou signal dans la zone morte (+/- 4%) |
Rouge/vert |
Allumé clignotant |
Prêt pour la calibration. Plusieurs clignotements verts indiquent que la calibration s’est effectuée avec succès et plusieurs clignotements rouges indiquent que la calibration a échoué. |
Contrôleur de moteur Talon

Vert |
Solide |
Avant (pleine puissance) |
Allumé clignotant |
Proportionnel au voltage de sortie (avant) |
|
Rouge |
Solide |
Arrière (pleine puissance) |
Allumé clignotant |
Proportionnel au voltage de sortie (arrière) |
|
Orange |
Solide |
Aucun appareil CAN n’est connecté |
Allumé clignotant |
Désactivé, signal PWM perdu, robot FRC désactivé ou signal dans la zone morte (+/- 4%) |
|
Éteint |
Aucune alimentation au Talon |
|
Rouge/vert |
Clignotant |
Prêt pour la calibration. Plusieurs clignotements verts indiquent que la calibration s’est effectuée avec succès et plusieurs clignotements rouges indiquent que la calibration a échoué. |
Contrôleur de moteur Venom

REV Robotics Servo Power Module
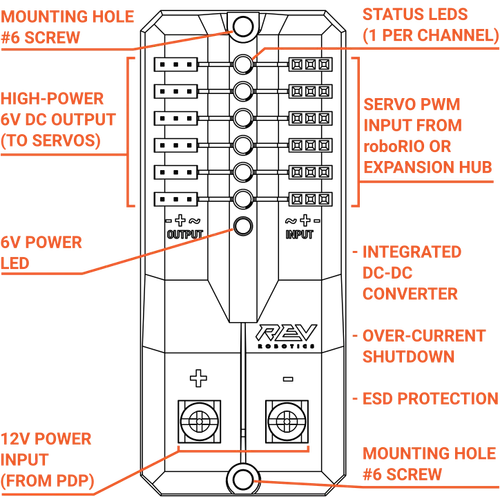
Témoins d’état
Each channel has a corresponding status LED that will indicate the sensed state of the connected PWM signal. The table below describes each state’s corresponding LED pattern.
État |
Témoin |
|---|---|
Aucun signal |
Ambre clignotant |
Signal négatif |
Rouge |
Signal neutre |
Ambre |
Signal positif |
Vert |
6V Power LED off, dim, or flickering with power applied = Over-current shutdown
REV Robotics Servo Hub
REV Servo Hub Status LED Patterns
General Status LED
Couleur de la DEL |
Statut |
|---|---|
Magenta clignotant |
Powered on but not connected to a controller or the REV Hardware Client |
Bleu |
Connected to REV Hardware Client |
Turquoise |
Connected to a roboRIO or CAN controller |
Vert |
Connected to a Control Hub or RS-485 controller |
Clignotant Orange/Turquoise |
Battery voltage is lower than 5.5V |
Clignotant Orange/Jaune |
CAN fault detected |
Clignotant Orange/Magenta |
Overcurrent fault |
Relais Spike configuré en tant que moteur, lumière ou interrupteur solénoïde
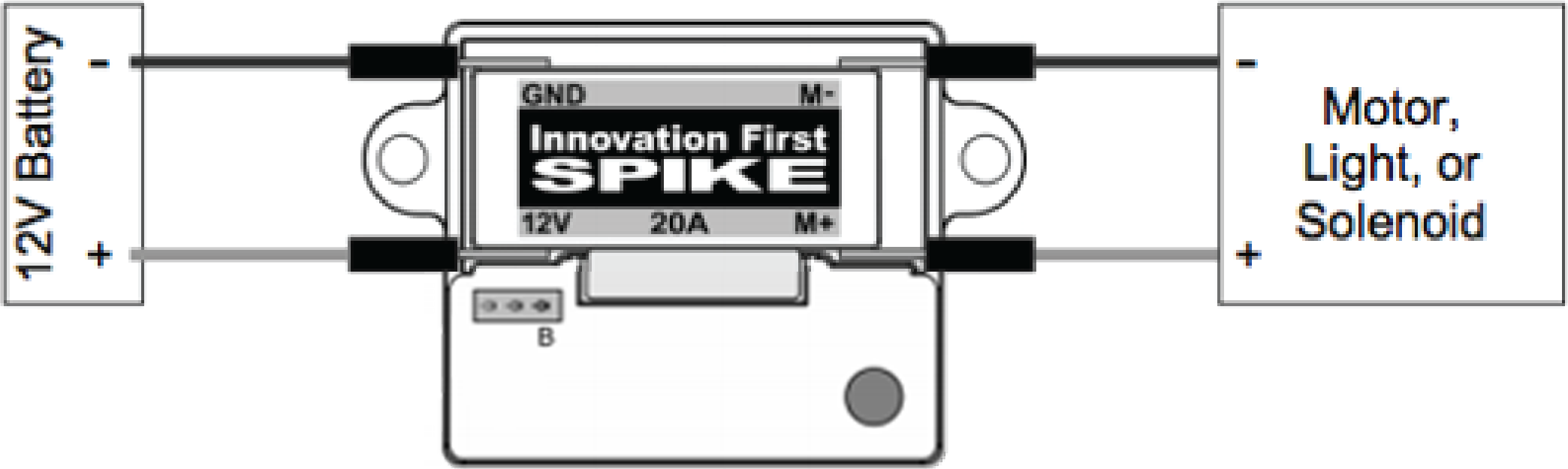
Entrées |
Sorties |
Témoin |
Fonction |
||
Avant (blanc) |
Arrière (rouge) |
M+ |
M- |
||
Éteint |
Éteint |
GND |
GND |
Orange |
Éteint/frein (défaut) |
Allumé |
Éteint |
+12v |
GND |
Vert |
Moteur tournant dans une direction |
Éteint |
Allumé |
GND |
+12v |
Rouge |
Moteur tournant dans la direction opposée |
Allumé |
Allumé |
+12v |
+12v |
Éteint |
Éteint/frein |
Note
Le frein se réfère à l’arrêt dynamique du moteur par le court-circuitage des terminaux du moteur. Ceci n’est pas optionnel lorsque le relais est désactivé.
Relais Spike configuré pour un ou deux solénoïdes
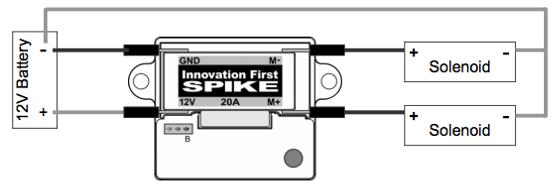
Entrées |
Sorties |
Témoin |
Fonction |
||
Avant (blanc) |
Arrière (rouge) |
M+ |
M- |
||
Éteint |
Éteint |
GND |
GND |
Orange |
Les deux solénoïdes sont éteints (défaut) |
Allumé |
Éteint |
+12v |
GND |
Vert |
Solénoïde connecté à M+ est alimenté |
Éteint |
Allumé |
GND |
+12v |
Rouge |
Solénoïde connecté à M- est alimenté |
Allumé |
Allumé |
+12v |
+12v |
Éteint |
Les deux solénoïdes sont alimentés |
Encodeur CANCoder

Couleur de la DEL |
Intensité de la DEL |
Détection du bus CAN |
Force du champ magnétique |
Description |
|---|---|---|---|---|
Éteint |
Éteint |
Le CANCoder n’est pas alimenté |
||
Jaune/Vert |
Lumineux |
L’appareil est dans le chargeur de démarrage. Référez-vous au manuel d’utilisateur pour plus d’information. |
||
Clignotement rouge lent |
Lumineux |
Le bus CAN a été perdu |
||
Clignotement rouge rapide |
Faible |
Bus CAN jamais détecté depuis le démarrage |
L’aimant est en dehors de la plage (<25mT or >135mT) |
|
Clignotement jaune rapide |
L’aimant est dans la plage avec une précision légèrement réduite (25-45mT ou 75-135mT) |
|||
Clignotement vert rapide |
L’aimant est dans la plage (entre 45mT et 75mT) |
|||
Clignotement rouge rapide |
Lumineux |
Bus CAN présent |
L’aimant est en dehors de la plage (<25mT or >135mT) |
|
Clignotement jaune rapide |
L’aimant est dans la plage avec une précision légèrement réduite (25-45mT ou 75-135mT) |
|||
Clignotement vert rapide |
L’aimant est dans la plage (entre 45mT et 75mT) |
CANivore
