Aperçu des composants matériels
Le but de ce document est de fournir un bref aperçu des composants matériels qui composent le Système de contrôle FRC®. Chaque composant contient une brève description de la fonction du composant et un lien vers plus de documentation.
Note
Pour les instructions/schémas de câblage, veuillez consulter le document Wiring the FRC Control System.
Survol du système de contrôle

Diagramme gracieuseté de l’équipe FRC® 3161 et Stefen Acepcion.

Diagramme gracieuseté de l’équipe FRC® 3161 et Stefen Acepcion.

Diagramme gracieuseté de l’équipe FRC® 3161 et Stefen Acepcion.
Contrôleur principal NI RoboRIO de National Instrument

Le NI-roboRIO est le contrôleur principal de robot utilisé pour FRC. Le roboRIO sert de «cerveau» pour le robot en exécutant le code généré par l’équipe et qui commande tous les dispositifs électroniques et mécaniques.
Panneau de distribution de puissance CTRE

The CTRE Power Distribution Panel (PDP) is designed to distribute power from a 12VDC battery to various robot components through auto-resetting circuit breakers and a small number of special function fused connections. The PDP provides 8 output pairs rated for 40A continuous current and 8 pairs rated for 30A continuous current. The PDP provides dedicated 12V connectors for the roboRIO, as well as connectors for the Voltage Regulator Module and Pneumatics Control Module. It also includes a CAN interface for logging current, temperature, and battery voltage. For more detailed information, see the PDP User Manual.
CTRE Power Distribution Panel 2.0

The CTRE Power Distribution Panel 2.0 (PDP 2.0) is designed to distribute power from a 12VDC battery to various robot components. The PDP 2.0 features 24 40A channels and can accoommodate ATO breakers. The PDP 2.0 is designed to maximize efficiency.
Note
The PDP 2.0 does not have buit in current logging and current logs will not be available in the Driver Station Log Viewer
Concentrateur de distribution de puissance REV
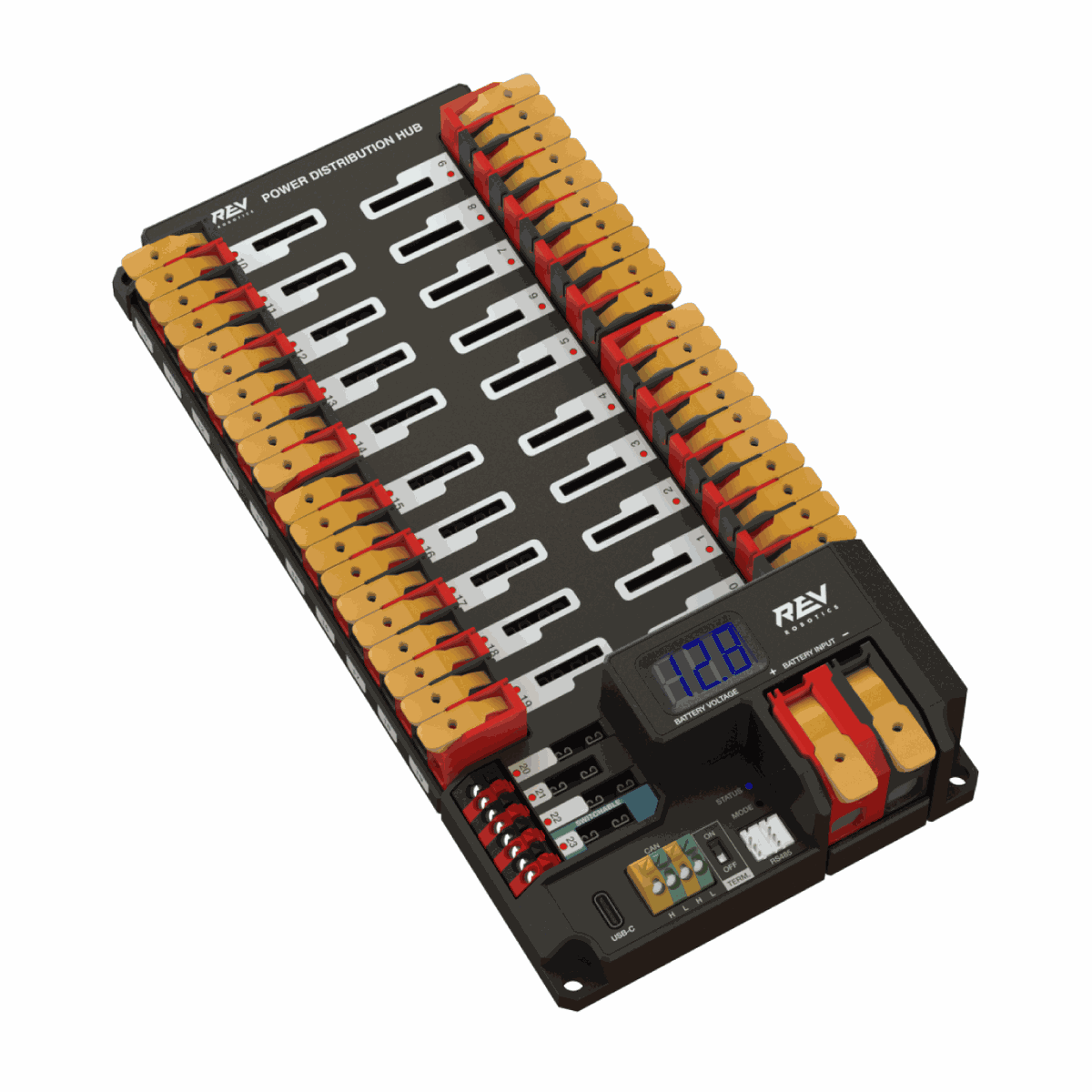
The REV Power Distribution Hub (PDH) is designed to distribute power from a 12VDC battery to various robot components. The PDH features 20 high-current (40A max) channels, 3 low-current (15A max), and 1 switchable low-current channel. The Power Distribution Hub features toolless latching WAGO terminals, an LED voltage display, and the ability to connect over CAN or USB-C to the REV Hardware Client for real-time telemetry.
AndyMark Power Distribution Board

The AndyMark Power Distribution Board (AMPD) is designed to distribute power from a 12VDC battery to various robot components. The AMPD features 24 fully insulated 40A ports that work with ATO/ATC breakers. With toolless lever connectors and 22.5 degree angled outputs for clean wiring, the AMPD is designed to simplify robot wiring.
Note
The AMPD does not have buit in current logging and current logs will not be available in the Driver Station Log Viewer
Module régulateur de tension CTRE

The CTRE Voltage Regulator Module (VRM) is an independent module that is powered by 12 volts. The device is wired to a dedicated connector on the PDP. The module has multiple regulated 12V and 5V outputs. The purpose of the VRM is to provide regulated power for the custom circuits, and IP vision cameras. For more information, see the VRM User Manual.
Vivid-Hosting VH-109 Radio

The Vivid-Hosting VH-109 radio is designed specifically for FRC. It uses Wi-Fi 6E to avoid the common congestion problems that plague 2.4 GHz Wi-Fi networks. The ruggedized design allows for unfiltered power input coming directly from a power distribution device. It also has 4 Ethernet ports reducing the need for an additional network switch.
Disjoncteur 120A

Le disjoncteur principal de 120 A joue deux rôles sur le robot, soit l’interrupteur d’alimentation principal du robot et un dispositif de protection pour le câblage et les composants du robot en aval. Le disjoncteur de 120 A est câblé aux bornes positives de la batterie du robot et des tableaux de distribution d’alimentation. Pour plus d’informations, veuillez consulter la Fiche technique de la série Cooper Bussmann 18X (PN: 185120F)
Disjoncteurs à Action rapide

The Snap Action circuit breakers, MX5 series and VB3 Series, are used with the Power Distribution Panel to limit current to branch circuits. The ratings on these circuit breakers are for continuous current, temporary peak values can be considerably higher.
Rev ATO Circuit Breakers

The Rev ATO Circuit Breakers are used with the Power Distribution Panel, Power Distribution Hub, and Power Distribution Panel 2.0 to limit current to branch circuits. They come in 40A, 30A, 20A, and 10A variants. The ratings on these circuit breakers are for continuous current, temporary peak values can be considerably higher.
CTRE Power Distribution Panel Breakers

The CTRE Power Distribution Panel Breakers are auto-reset circuit breakers designed for use with CTRE Power Distribution Panels. They come in 40A, 30A, 20A, and 10A variants. These custom ATO-sized breakers automatically reset after tripping, providing consistent performance even after hundreds of trips.
Batterie du Robot

L’alimentation électrique d’un robot FRC est composé d’une seule batterie plomb-acide scellée (SLA) 12V 18Ah, capable de répondre aux demandes de courant élevées d’un robot FRC. Pour plus d’informations, consultez la page Batterie du Robot.
Note
Multiple battery part numbers may be legal, consult the FRC Manual for a complete list.
Signal lumineux du robot


Le voyant de signalisation du robot (RSL) doit être le Allen-Bradley 855PB-B12ME522 ou bien le AndyMark am-3583. Il est directement contrôlé par le roboRIO et clignote lorsqu’il est activé et reste fixe lorsqu’il est désactivé.
Module de commande pneumatique CTRE

The CTRE Pneumatics Control Module (PCM) contains all of the inputs and outputs required to operate 12V or 24V pneumatic solenoids and the on board compressor. The PCM contains an input for the pressure sensor and will control the compressor automatically when the robot is enabled and a solenoid has been created in the code. For more information see the PCM User Manual.
Concentrateur pneumatique REV
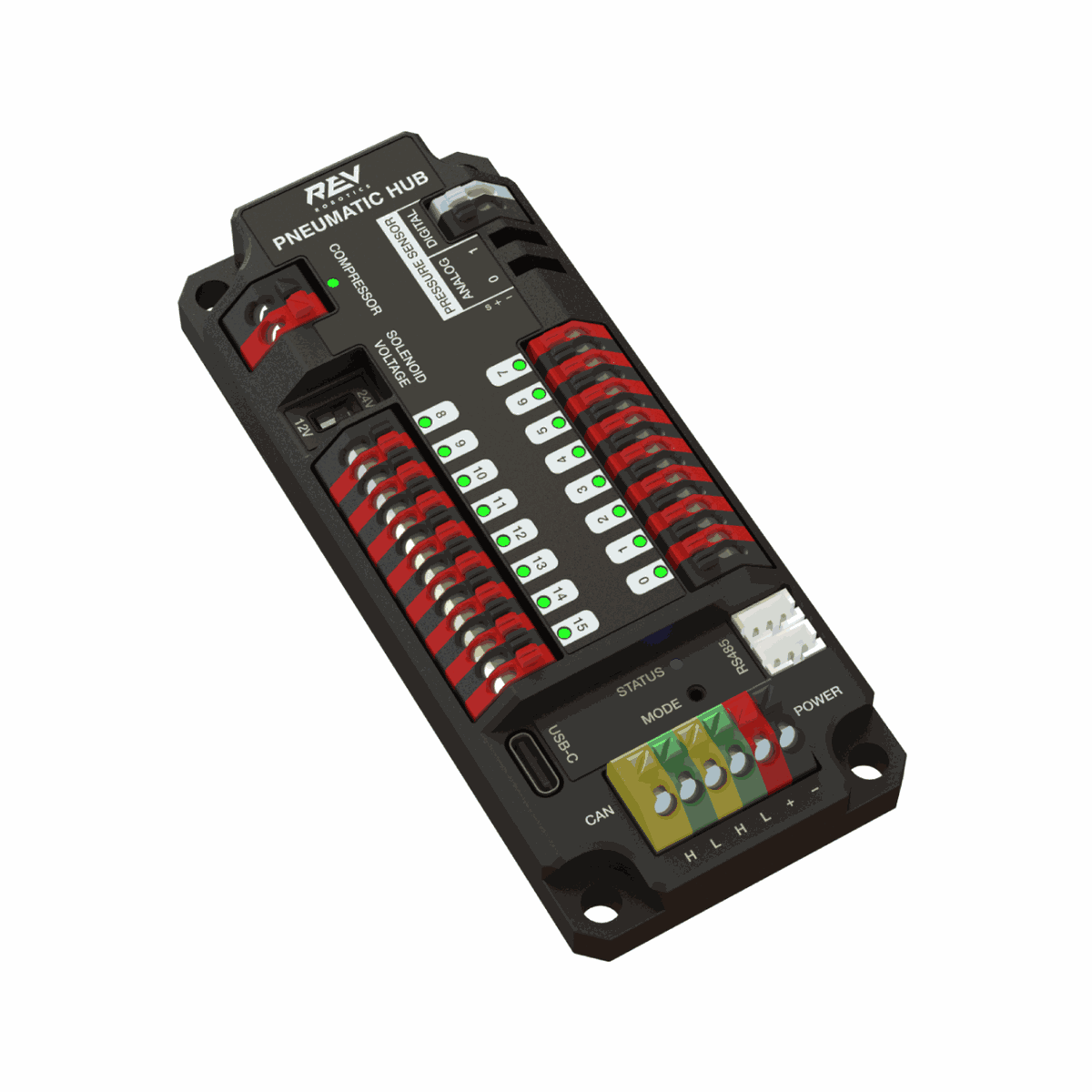
The REV Pneumatic Hub is a standalone module that is capable of switching both 12V and 24V pneumatic solenoid valves. The Pneumatic Hub features 16 solenoid channels which allow for up to 16 single-acting solenoids, 8 double-acting solenoids, or a combination of the two types. The user selectable output voltage is fully regulated, allowing even 12V solenoids to stay active when the robot battery drops as low as 4.75V.
Des ports relatifs aux capteur de pression numériques et analogiques sont intégrés à l’appareil, ce qui augmente la flexibilité et la fonctionnalité de rétroaction du système pneumatique. La connexion USB-C sur le Concentrateur fonctionne avec le client matériel REV, permettant aux utilisateurs de tester des systèmes pneumatiques sans avoir besoin d’un contrôleur de robot supplémentaire.
Contrôleurs de Moteurs
There are a variety of different motor controllers which work with the FRC Control System and are approved for use. These devices are used to provide variable voltage control of the brushed and brushless DC motors used in FRC. They are listed here in order of usage placement is estimated for devices where data is unavailable.
Note
Le contrôle CAN des tierce-parties n’est pas pris en charge par WPILib. Consultez cette section sur Périphériques CAN provenant de tierce-partie pour plus d’informations.
Contrôleur de Moteur SPARK MAX

The SPARK MAX Motor Controller is an advanced brushed and brushless DC motor controller from REV Robotics. When using CAN bus or USB control, the SPARK MAX uses input from limit switches, encoders, and other sensors, including the integrated encoder of the REV NEO Brushless Motor, to perform advanced control modes. The SPARK MAX can be controlled over PWM, CAN, or USB (for configuration/testing only). For more information, see the SPARK MAX Documentation.
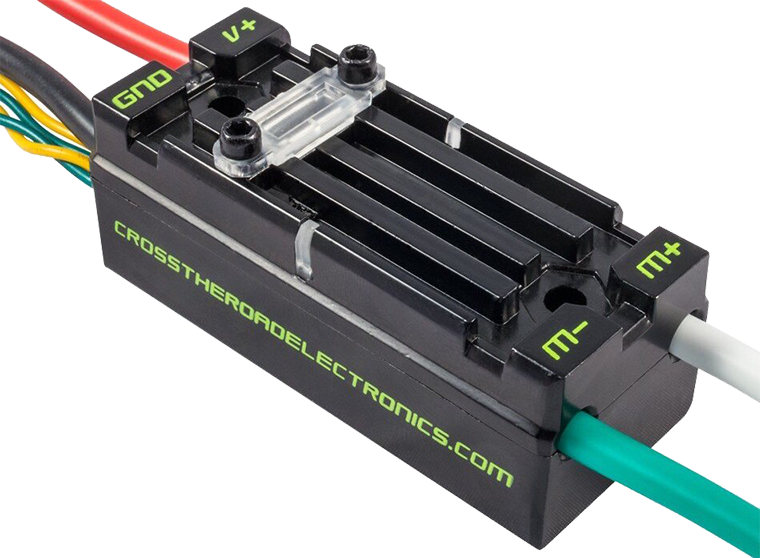
Contrôleur de moteur TalonFX

The TalonFX Motor Controller is a brushless motor controller from Cross The Road Electronics which is integrated into the Falcon 500, Kraken X60, and Kraken X44 brushless motors. It features an integrated encoder and all of the smart features of the Talon SRX and more! For more information see the TalonFX Hardware Reference.
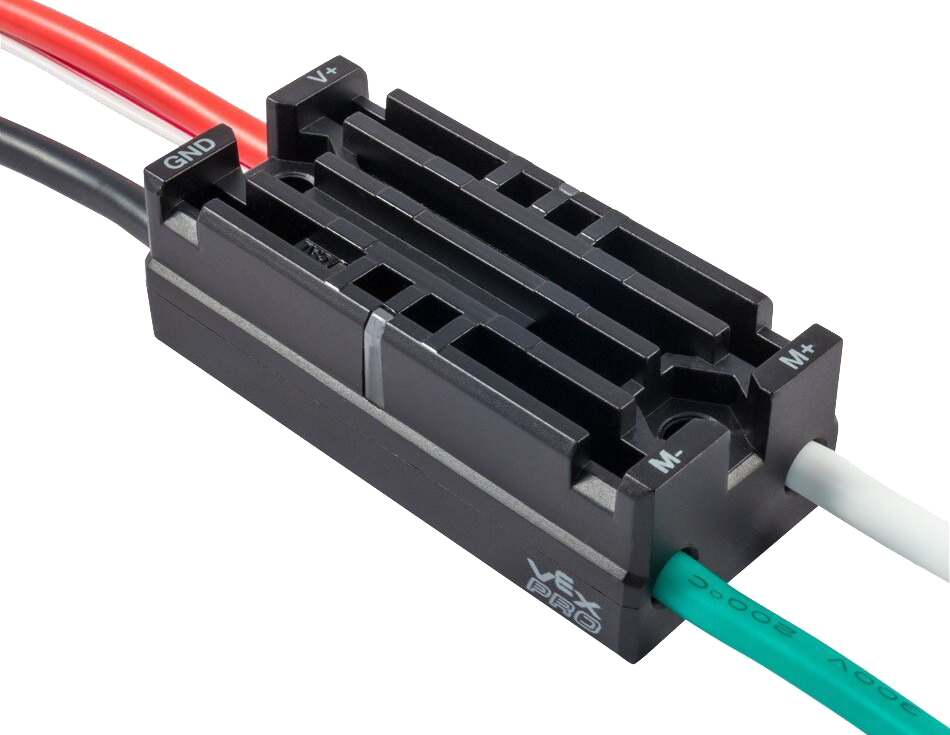
Victor SPX

The Victor SPX Motor Controller is a CAN or PWM controlled motor controller from Cross The Road Electronics/VEX Robotics. The device is connectorized to allow easy connection to the roboRIO PWM connectors or a CAN bus. The case is sealed to prevent debris from entering the controller. For more information, see the Victor SPX User Guide.
Talon SRX
The Talon SRX Motor Controller is a « smart motor controller » from Cross The Road Electronics/VEX Robotics. The Talon SRX can be controlled over the CAN bus or PWM interface. When using the CAN bus control, this device can take inputs from limit switches and potentiometers, encoders, or similar sensors in order to perform advanced control. For more information see the Talon SRX User’s Guide.
Contrôleur de Moteur Spark

Avertissement
Bien que ce contrôleur moteur soit toujours légal pour une utilisation en FRC, le manufacturier a mis fin à la production de ce composant.
The SPARK Motor Controller from REV Robotics is an inexpensive brushed DC motor controller. The SPARK is controlled using the PWM interface. Limit switches may be wired directly to the SPARK to limit motor travel in one or both directions.
Victor SP
Avertissement
Bien que ce contrôleur moteur soit toujours légal pour une utilisation en FRC, le manufacturier a mis fin à la production de ce composant.
The Victor SP Motor Controller is a PWM motor controller from Cross The Road Electronics/VEX Robotics. The Victor SP has an electrically isolated metal housing for heat dissipation, making the use of the fan optional. The case is sealed to prevent debris from entering the controller. The controller is approximately half the size of previous models.
SPARK Flex Motor Controller

The SPARK Flex Motor Controller is a smart brushed and brushless DC motor controller from Rev Robotics. It is designed for semi-permanent docking to NEO Vortex brushless motors, but can be used with other brushed and brushless motors through the use of an adapter dock. When using CAN bus or USB control, the SPARK Flex uses input from limit switches, encoders, and other sensors, including the integrated encoder of NEO Vortex, Neo 1.0/1.1 and NEO 550 brushless motors, to perform advanced control modes. The SPARK Flex can be controlled over PWM, CAN, or USB (for configuration/testing only). For more information, see the SPARK Flex Documentation.
Contrôleur de Moteur Talon

Avertissement
Bien que ce contrôleur moteur soit toujours légal pour une utilisation en FRC, le manufacturier a mis fin à la production de ce composant.
The Talon Motor Controller from Cross the Road Electronics is a PWM controlled brushed DC motor controller with passive cooling.
Contrôleur de moteur Venom

The Venom Motor Controller from Playing With Fusion is integrated into a motor based on the original CIM. Speed, current, temperature, and position are all measured onboard, enabling advanced control modes without complicated sensing and wiring schemes.
Thrifty Nova Motor Controller

The Thrifty Nova Motor Controller is a brushless DC motor controller from The Thrifty Bot with CAN and USB connectivity. It can receive sensor inputs from NEO and NEO 550 brushless motors as well as other sensors with the use of expansion boards. For more information, see the Thrifty Nova Documentation.
Talon FXS Motor Controller

The Talon FXS Motor Controller is a smart brushed and brushless DC motor controller from Cross The Road Electronics.
Koors 40 Brushed DC Motor Controller

The Koors 40 Brushed DC Motor Controller is an inexpensive PWM brushed DC motor controller from AndyMark with features such as Ground Loss Protection for PWM, Thermal, and Overcurrent Protection, and Reverse Polarity Protection.
Relais H-Bridge Spike

Avertissement
Bien que ce relais soit toujours légal pour l’utilisation eb FRC, le manufacturier a cessé de fabriquer ce produit.
The Spike H-Bridge Relay from VEX Robotics is a device used for controlling power to motors or other custom robot electronics. When connected to a motor, the Spike provides On/Off control in both the forward and reverse directions. The Spike outputs are independently controlled so it can also be used to provide power to up to 2 custom electronic circuits. The Spike H-Bridge Relay should be connected to a relay output of the roboRIO and powered from the Power Distribution Panel. For more information, see the Spike User’s Guide.
Servo Hub

The Servo Hub from Rev Robotics can control up to 6 servos. It can output a maximum of 15A across all channels and. The Servo Hub supports USB, RS485 and CAN control.
Module d’Alimentation Servo

The Servo Power Module from Rev Robotics is capable of expanding the power available to servos beyond what the roboRIO integrated power supply is capable of. The Servo Power Module provides up to 90W of 6V power across 6 channels. All control signals are passed through directly from the roboRIO. For more information, see the Servo Power Module webpage.
Microsoft Lifecam HD3000

The Microsoft Lifecam HD3000 is a USB webcam that can be plugged directly into the roboRIO. The camera is capable of capturing up to 1280x720 video at 30 FPS. For more information about the camera, see the Microsoft product page. For more information about using the camera with the roboRIO, see the Vision Processing section of this documentation.
Crédits d’Images
Image of roboRIO courtesy of National Instruments. Images of Talon SRX, Victor SP, Victor SPX, and Spike H-Bridge Relay courtesy of VEX Robotics, Inc. Image of SPARK MAX, SPARK Flex, Servo Hub, ATO Breakers, Power Distribution Hub, and Pneumatic Hub courtesy of REV Robotics. Images of TalonFX, TalonFXS, Power Distribution Panel 2.0, and Power Distribution Panel Breakers courtesy of Cross The Road Electronics, LLC. Image of Thrifty Nova courtesy of The Thrifty Bot. Lifecam, PDP, PCM, SPARK, and VRM photos courtesy of FIRST®. Image of the VH-109 radio courtesy of Vivid-Hosting. All other photos courtesy of AndyMark Inc.