DELs adressables
LED strips have been commonly used by teams for several years for a variety of reasons. They allow teams to debug robot functionality from the audience, provide a visual marker for their robot, and can simply add some visual appeal. WPILib has an API for controlling WS2812, WS2812B, and WS2815 LEDs with their data pin connected via PWM.
Note
LEDs can be controlled through this API while the robot is disabled.
Important
The roboRIO can only control one AddressableLED object at a time through its PWM ports. Attempting to create multiple AddressableLED objects will result in a HAL allocation error. If you need to control multiple physical LED strips, you have several options:
Daisy-chain strips in series: Connect multiple LED strips end-to-end as a single long strip, then use buffer views to control different sections independently
Use PWM Y-cables: If you need identical patterns on multiple strips, use PWM Y-cables to send the same signal to multiple strips simultaneously
Voir aussi
For detailed information about powering and best practices for addressable LEDs, see the Adafruit NeoPixel Überguide.
Avertissement
WS2812B LEDs are designed for 5V, but roboRIO PWM/Servo ports output 6V. While the LEDs will function, this may reduce their lifespan. Consider using a voltage regulator or level shifter if longevity is a concern.
Instanciation de l’objet adressableLED
You first create an AddressableLED object that takes the PWM port as an argument. It must be a PWM header on the roboRIO. Then you set the number of LEDs located on your LED strip, which can be done with the setLength() function.
Avertissement
Il est important de noter que le réglage de la longueur décrit ci-haut est une tâche relativement longue à exécuter pour le roboRIO, et il n’est pas recommandé de l’exécuter périodiquement.
Une fois la longueur de la bande définie, vous devrez créer un objet AddressableLEDBuffer qui prendra le nombre de LED comme entrée. Vous appellerez ensuite myAddressableLed.setData(myAddressableLEDBuffer) pour définir les données correspondant à chaque LED. Enfin, vous pouvez appeler myAddressableLed.start() pour écrire la sortie en continu. Voici un exemple complet du processus d’initialisation.
Note
C++ ne supporte pas un AddressableLEDBuffer et utilise à la place un tableau.
32 /** Called once at the beginning of the robot program. */
33 public Robot() {
34 // PWM port 9
35 // Must be a PWM header, not MXP or DIO
36 m_led = new AddressableLED(9);
37
38 // Reuse buffer
39 // Default to a length of 60, start empty output
40 // Length is expensive to set, so only set it once, then just update data
41 m_ledBuffer = new AddressableLEDBuffer(60);
42 m_led.setLength(m_ledBuffer.getLength());
43
44 // Set the data
45 m_led.setData(m_ledBuffer);
46 m_led.start();
47 }
12 private:
13 static constexpr int kLength = 60;
14
15 // PWM port 9
16 // Must be a PWM header, not MXP or DIO
17 frc::AddressableLED m_led{9};
18 std::array<frc::AddressableLED::LEDData, kLength>
19 m_ledBuffer; // Reuse the buffer
20
21 // Our LED strip has a density of 120 LEDs per meter
7Robot::Robot() {
8 // Default to a length of 60, start empty output
9 // Length is expensive to set, so only set it once, then just update data
10 m_led.SetLength(kLength);
11 m_led.SetData(m_ledBuffer);
12 m_led.Start();
13}
Controlling Sections of an LED Strip
The roboRIO can only control a single addressable LED output at a time, but there are often multiple physical LED strips daisy-chained around a robot, or a single flexible LED strip wrapped around structures on a robot. Individual sections can be accessed in Java using AddressableLEDBufferView. Buffer views behave like subsections of the larger buffer, and can be accessed using indices in the typical [0, length) range. They can also be reversed, to allow for parallel serpentine sections to be animated in the same physical orientation (i.e. both sections would animate « forward » in the same direction, even if the strips are physically tip-to-tail).
// Create the buffer
AddressableLEDBuffer m_buffer = new AddressableLEDBuffer(120);
// Create the view for the section of the strip on the left side of the robot.
// This section spans LEDs from index 0 through index 59, inclusive.
AddressableLEDBufferView m_left = m_buffer.createView(0, 59);
// The section of the strip on the right side of the robot.
// This section spans LEDs from index 60 through index 119, inclusive.
// This view is reversed to cancel out the serpentine arrangement of the
// physical LED strip on the robot.
AddressableLEDBufferView m_right = m_buffer.createView(60, 119).reversed();
// Create the buffer
std::array<frc::AddressableLED::LEDData, 120> m_buffer;
// Create the view for the section of the strip on the left side of the robot.
// This section spans LEDs from index 0 through index 59, inclusive.
std::view<frc::AddressableLED::LEDData> m_left =
std::ranges::take_view(m_buffer, 60);
// The section of the strip on the right side of the robot.
// This section spans LEDs from index 60 through index 119, inclusive.
// This view is reversed to cancel out the serpentine arrangement of the
// physical LED strip on the robot.
std::view<frc::AddressableLED::LEDData> m_right =
std::ranges::reverse_view(
std::ranges::drop_view(m_buffer, 60));
LED Patterns
The LEDPattern API simplifies setting LED data. Rather than needing to manually loop over every LED index, you can apply a pattern object to the data buffer directly. LED patterns are stateless, and can safely be applied to multiple buffers or views.
// Create an LED pattern that sets the entire strip to solid red
LEDPattern red = LEDPattern.solid(Color.kRed);
// Apply the LED pattern to the data buffer
red.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that sets the entire strip to solid red
LEDPattern red = LEDPattern.Solid(Color::kRed);
// Apply the LED pattern to the data buffer
red.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Création d’un effet arc-en-ciel
Using the built in LEDPattern.rainbow method, we can create a pattern that displays a full rainbow across an entire LED strip. Then, by calling scrollAtAbsoluteSpeed we can make it animate and cycle around the strip. rainbow accepts two arguments - one for the saturation and one for the value, expressed as a number from 0 to 255.
Note
Animating effects like scrolling use the Java units library and the C++ units library for speeds and durations.
The base rainbow pattern will look like this:

21 // all hues at maximum saturation and half brightness
22 private final LEDPattern m_rainbow = LEDPattern.rainbow(255, 128);
23
24 // Our LED strip has a density of 120 LEDs per meter
25 private static final Distance kLedSpacing = Meters.of(1 / 120.0);
26
27 // Create a new pattern that scrolls the rainbow pattern across the LED strip, moving at a speed
28 // of 1 meter per second.
29 private final LEDPattern m_scrollingRainbow =
30 m_rainbow.scrollAtAbsoluteSpeed(MetersPerSecond.of(1), kLedSpacing);
27 // Our LED strip has a density of 120 LEDs per meter
28 units::meter_t kLedSpacing{1 / 120.0};
29
30 // Create an LED pattern that will display a rainbow across
31 // all hues at maximum saturation and half brightness
32 frc::LEDPattern m_rainbow = frc::LEDPattern::Rainbow(255, 128);
33
34 // Create a new pattern that scrolls the rainbow pattern across the LED
35 // strip, moving at a speed of 1 meter per second.
36 frc::LEDPattern m_scrollingRainbow =
37 m_rainbow.ScrollAtAbsoluteSpeed(1_mps, kLedSpacing);
Now that the rainbow pattern is defined, we only need to apply it.
50 public void robotPeriodic() {
51 // Update the buffer with the rainbow animation
52 m_scrollingRainbow.applyTo(m_ledBuffer);
53 // Set the LEDs
54 m_led.setData(m_ledBuffer);
55 }
56}
15void Robot::RobotPeriodic() {
16 // Run the rainbow pattern and apply it to the buffer
17 m_scrollingRainbow.ApplyTo(m_ledBuffer);
18 // Set the LEDs
19 m_led.SetData(m_ledBuffer);
20}
Controlling when patterns are applied
Use commands. The command framework is specifically built for managing when actions run and stop, and prevents multiple actions from running simultaneously.
public class LEDSubsystem extends SubsystemBase {
private static final int kPort = 9;
private static final int kLength = 120;
private final AddressableLED m_led;
private final AddressableLEDBuffer m_buffer;
public LEDSubsystem() {
m_led = new AddressableLED(kPort);
m_buffer = new AddressableLEDBuffer(kLength);
m_led.setLength(kLength);
m_led.start();
// Set the default command to turn the strip off, otherwise the last colors written by
// the last command to run will continue to be displayed.
// Note: Other default patterns could be used instead!
setDefaultCommand(runPattern(LEDPattern.solid(Color.kBlack)).withName("Off"));
}
@Override
public void periodic() {
// Periodically send the latest LED color data to the LED strip for it to display
m_led.setData(m_buffer);
}
/**
* Creates a command that runs a pattern on the entire LED strip.
*
* @param pattern the LED pattern to run
*/
public Command runPattern(LEDPattern pattern) {
return run(() -> pattern.applyTo(m_buffer));
}
}
Header:
class LEDSubsystem : public SubsystemBase {
public:
LEDSubsystem();
void Periodic() override;
frc::CommandPtr RunPattern(frc::LEDPattern pattern);
private:
static constexpr int kPort = 9;
static constexpr int kLength = 120;
frc::AddressableLED m_led{kPort};
std::array<frc::AddressableLED::LEDData, kLength> m_ledBuffer;
}
LEDSubsystem::LEDSubsystem() {
m_led.SetLength(kLength);
m_led.Start();
// Set the default command to turn the strip off, otherwise the last colors written by
// the last command to run will continue to be displayed.
// Note: Other default patterns could be used instead!
SetDefaultCommand(RunPattern(frc::LEDPattern::Solid(frc::Color::kBlack)).WithName("Off"));
}
LEDSubsystem::Periodic() {
// Periodically send the latest LED color data to the LED strip for it to display
m_led.SetData(m_ledBuffer);
}
frc::CommandPtr LEDSubsystem::RunPattern(frc::LEDPattern pattern) {
// std::move is necessary for inline pattern declarations to work
// Otherwise we could have a use-after-free!
return Run([this, pattern = std::move(pattern)] { pattern.ApplyTo(m_buffer); });
}
Basic effects
The basic effects can all be created from the factory methods declared in the LEDPattern class
Solid color

The solid color pattern sets the target LED buffer to a single solid color.
// Create an LED pattern that sets the entire strip to solid red
LEDPattern red = LEDPattern.solid(Color.kRed);
// Apply the LED pattern to the data buffer
red.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that sets the entire strip to solid red
LEDPattern red = LEDPattern.Solid(Color::kRed);
// Apply the LED pattern to the data buffer
red.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Continuous Gradient
The gradient pattern sets the target buffer to display a smooth gradient between the specified colors. The gradient wraps around so scrolling effects can be seamless.

// Create an LED pattern that displays a red-to-blue gradient.
// The LED strip will be red at both ends and blue in the center,
// with smooth gradients between
LEDPattern gradient = LEDPattern.gradient(LEDPattern.GradientType.kContinuous, Color.kRed, Color.kBlue);
// Apply the LED pattern to the data buffer
gradient.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient.
// The LED strip will be red at both ends and blue in the center,
// with smooth gradients between
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern gradient = LEDPattern.Gradient(LEDPattern::GradientType::kContinuous, colors);
// Apply the LED pattern to the data buffer
gradient.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Discontinuous Gradient
The gradient pattern sets the target buffer to display a smooth gradient between the specified colors. The gradient does not wrap around so it can be used for non-scrolling patterns that don’t care about continuity.

// Create an LED pattern that displays a red-to-blue gradient.
// The LED strip will be red at one end and blue at the other.
LEDPattern gradient = LEDPattern.gradient(LEDPattern.GradientType.kDiscontinuous, Color.kRed, Color.kBlue);
// Apply the LED pattern to the data buffer
gradient.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient.
// The LED strip will be red at one end and blue at the other.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern gradient = LEDPattern.Gradient(LEDPattern::GradientType::kDiscontinuous, colors);
// Apply the LED pattern to the data buffer
gradient.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Steps

Displays segments of solid colors along the target buffer. This combines well with mask and overlay combination effects.
Steps are specified as a combination of the starting position of that color, as a number between 0 (start of the buffer) and 1 (end of the buffer).
Note
If the first step does not start at zero, every LED before that step starts will be set to black - effectively, as if there is a default step of (0, Color.kBlack) that can be overwritten.
// Create an LED pattern that displays the first half of a strip as solid red,
// and the second half of the strip as solid blue.
LEDPattern steps = LEDPattern.steps(Map.of(0, Color.kRed, 0.5, Color.kBlue));
// Apply the LED pattern to the data buffer
steps.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays the first half of a strip as solid red,
// and the second half of the strip as solid blue.
std::array<std::pair<double, Color>, 2> colorSteps{std::pair{0.0, Color::kRed},
std::pair{0.5, Color::kBlue}};
LEDPattern steps = LEDPattern.Steps(colorSteps);
// Apply the LED pattern to the data buffer
gradient.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Progress mask
Slightly different from the basic color patterns, the progress mask pattern generates a white-and-black pattern where the white portion is a varying length depending on the value of the value function. This can be combined with another pattern using a mask to display a portion of another base pattern depending on the progress of some process - such as the position of a mechanism in its range of motion (eg an elevator’s height) or the progress of a PID controller towards its goal.
// Create an LED pattern that displays a black-and-white mask that displays the current height of an elevator
// mechanism. This can be combined with other patterns to change the displayed color to something other than white.
LEDPattern pattern = LEDPattern.progressMaskLayer(() -> m_elevator.getHeight() / m_elevator.getMaxHeight());
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a black-and-white mask that displays the current height of an elevator
// mechanism. This can be combined with other patterns to change the displayed color to something other than white.
LEDPattern pattern = LEDPattern::ProgressMaskLayer([&]() { return m_elevator.GetHeight() / m_elevator.GetMaxHeight(); });
// Apply the LED pattern to the data buffer
pattern.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Modifying effects
Basic LED patterns can be combined with modifier effects to create new patterns with a combination of effects. Multiple modifiers can be used together to create complex patterns.
Note
The built in animating effects like blinking and scrolling are based on the time returned by WPIUtilJNI.now() - in effect, they will play as if they started when the robot booted. Because all built in animation patterns are periodic, this means that the first period of a pattern may be truncated at any arbitrary point between 0% and 100%, and every period after that will play normally.
Offset

Offsets can be used to bias patterns forward of backward by a certain number of pixels. Offset patterns will wrap around the end of an LED strip; offset values can be positive (biasing away from the start of the strip) or negative (biasing towards the start of the strip).
// Create an LED pattern that displays a red-to-blue gradient, offset 40 pixels forward.
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern pattern = base.offsetBy(40);
LEDPattern negative = base.offsetBy(-20); // Equivalent to the above when applied to a 60-LED buffer
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient, offset 40 pixels forward.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern pattern = base.OffsetBy(40);
LEDPattern negative = base.OffsetBy(-20); // Equivalent to the above when applied to a 60-LED buffer
// Apply the LED pattern to the data buffer
heightDisplay.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Reverse

Patterns and animations can be reversed to flip the direction that patterns are applied in; instead of starting from the lowest-indexed pixel in a buffer or view, a reversed pattern will start from the highest-indexed pixel and move toward the lowest-index pixel. A reversed scrolling pattern will scroll in reverse, as if its velocity’s sign was flipped.
// Create an LED pattern that displays a red-to-blue gradient, then reverse it so it displays blue-to-red.
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern pattern = base.reversed();
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient, then reverse it so it displays blue-to-red.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern pattern = base.Reversed();
// Apply the LED pattern to the data buffer
heightDisplay.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Scroll
Scrolling can be controlled in two different ways: either at a speed as a function of the length of the buffer or view to which it is applied (i.e., the scrolling speed is in terms of percentage per second, or a similar unit), or as a function of the density of the physical LED strips (i.e. scrolling speed is in meters per second, or a similar unit). Relative velocities are particularly useful when a scrolling pattern is applied to different LED strips with different LED spacing (such as one strip with 120 LEDs per meter daisy chained to a second strip with 60 or 144 LEDs per meter), when prototyping before having a particular LED strip in mind (where the density isn’t yet known), or when LED strips are quickly changed out. Scrolling at a fixed real-world speed (eg InchesPerSecond.of(2)) may be more understandable to readers, but will move faster or slower when applied to an LED strip with a lower or higher pixel density, respectively.
// Create an LED pattern that displays a red-to-blue gradient, then scroll at one quarter of the LED strip's length per second.
// For a half-meter length of a 120 LED-per-meter strip, this is equivalent to scrolling at 12.5 centimeters per second.
Distance ledSpacing = Meters.of(1 / 120.0);
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern pattern = base.scrollAtRelativeSpeed(Percent.per(Second).of(25));
LEDPattern absolute = base.scrollAtAbsoluteSpeed(Centimeters.per(Second).of(12.5), ledSpacing);
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient, then scroll at one quarter of the LED strip's length per second.
// For a half-meter length of a 120 LED-per-meter strip, this is equivalent to scrolling at 12.5 centimeters per second.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern pattern = base.ScrollAtRelativeSpeed(units::hertz_t{0.25});
LEDPattern absolute = base.ScrollAtAbsoluteSpeed(0.125_mps, units::meter_t{1/120.0});
// Apply the LED pattern to the data buffer
heightDisplay.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Breathe
A breathing modifier will make the base pattern brighten and dim in a sinusoidal pattern over the given period of time. Brightness is relative to the original brightness of the base pattern - breathing will only make it dimmer, never brighter than the original.
// Create an LED pattern that displays a red-to-blue gradient, breathing at a 2 second period (0.5 Hz)
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern pattern = base.breathe(Seconds.of(2));
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient, breathing at a 2 second period (0.5 Hz)
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern pattern = base.Breathe(2_s);
// Apply the LED pattern to the data buffer
heightDisplay.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Blink
Blinking can be done in one of three ways:
Symmetrically, where an equal amount of time is spent in the « on » and « off » states per cycle
Asymetrically, where the time spent « on » can be configured independently from the time spent « off »
Synchronously, where the time spent on and off is synchronized with an external source (for example, the state of the RSL)
// Create an LED pattern that displays a red-to-blue gradient, blinking at various rates.
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
// 1.5 seconds on, 1.5 seconds off, for a total period of 3 seconds
LEDPattern pattern = base.blink(Seconds.of(1.5));
// 2 seconds on, 1 second off, for a total period of 3 seconds
LEDPattern asymmetric = base.blink(Seconds.of(2), Seconds.of(1));
// Turn the base pattern on when the RSL is on, and off when the RSL is off
LEDPattern sycned = base.synchronizedBlink(RobotController::getRSLState);
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient, blinking at various rates.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
// 1.5 seconds on, 1.5 seconds off, for a total period of 3 seconds
LEDPattern pattern = base.Blink(1.5_s);
// 2 seconds on, 1 second off, for a total period of 3 seconds
LEDPattern asymmetric = base.Blink(2_s, 1_s));
// Turn the base pattern on when the RSL is on, and off when the RSL is off
LEDPattern sycned = base.SynchronizedBlink([]() { return RobotController.GetRSLState(); });
// Apply the LED pattern to the data buffer
pattern.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Brightness

Patterns can be brightened and dimmed relative to their original brightness; a brightness value of 100% is identical to the original pattern, a value of 200% is twice as bright, and a value of 0% is completely turned off. This can be useful in a pinch to tone down patterns that are too bright (apologies to the 2024 NE Greater Boston district event staff, who were subjected to a maximimum brightness white flashing pattern with a precursor version of this library before the brightness modifier was added).
Note
For speed, brightness calculations are done naively in the RGB color space instead of HSL/HSV/Lab. This sacrifices accuracy, so large changes in brightness may look undersaturated.
// Create an LED pattern that displays a red-to-blue gradient at half brightness
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern pattern = base.atBrightness(Percent.of(50));
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient at half brightness
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern pattern = base.AtBrightness(0.5);
// Apply the LED pattern to the data buffer
pattern.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Combinatory effects
Complex LED patterns are built up from combining simple base patterns (such as solid colors or gradients) with animating effects (such as scrolling or breathing) and combinatory effects (like masks and overlays). Multiple effects can be combined at once, like in the scrolling rainbow effect above that takes a basic base effect - a static rainbow - and then adds a scrolling effect to it.
Mask
Masks work by combining the RGB values of two patterns and keeping only the values that are shared by both. The combination works on the individual bits of each color using a bitwise AND operation - for example, if a pixel’s red channel were set to 255 by one pattern (represented as 11111111 in binary), then the output red color would be identical to the red channel of the second pattern. If the first pattern sets it to zero (00000000 in binary), then the output red color would also be zero, regardless of whatever the second pattern sets. For this reason, black (all zeroes) and white (all ones) masks are very useful for selectively enabling and disabling parts of another pattern. Other mask colors can be used as well: masking with solid red would keep only the red channel of the original pattern, while discarding all green and blue values.
// Create an LED pattern that displays a red-to-blue gradient at a variable length
// depending on the relative position of the elevator. The blue end of the gradient
// will only be shown when the elevator gets close to its maximum height; otherwise,
// that end will be solid black when the elevator is at lower heights.
LEDPattern base = LEDPattern.discontinuousGradient(Color.kRed, Color.kBlue);
LEDPattern mask = LEDPattern.progressMaskLayer(() -> m_elevator.getHeight() / m_elevator.getMaxHeight());
LEDPattern heightDisplay = base.mask(mask);
// Apply the LED pattern to the data buffer
heightDisplay.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
// Create an LED pattern that displays a red-to-blue gradient at a variable length
// depending on the relative position of the elevator. The blue end of the gradient
// will only be shown when the elevator gets close to its maximum height; otherwise,
// that end will be solid black when the elevator is at lower heights.
std::array<Color, 2> colors{Color::kRed, Color::kBlue};
LEDPattern base = LEDPattern::DiscontinuousGradient(colors);
LEDPattern mask = LEDPattern::ProgressMaskLayer([&]() { m_elevator.GetHeight() / m_elevator.GetMaxHeight() });
LEDPattern heightDisplay = base.Mask(mask);
// Apply the LED pattern to the data buffer
heightDisplay.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Masks can also be animated (see progressMask). Masking a base pattern with a scrolling pattern will result in a panning effect. The animation above was generated by masking a rainbow pattern with a scrolling white/black pattern
Map<Double, Color> maskSteps = Map.of(0, Color.kWhite, 0.5, Color.kBlack);
LEDPattern base = LEDPattern.rainbow(255, 255);
LEDPattern mask =
LEDPattern.steps(maskSteps).scrollAtRelativeSpeed(Percent.per(Second).of(0.25));
LEDPattern pattern = base.mask(mask);
// Apply the LED pattern to the data buffer
pattern.applyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.setData(m_ledBuffer);
std::array<std::pair<double, Color>, 2> maskSteps{std::pair{0.0, Color::kWhite},
std::pair{0.5, Color::kBlack}};
LEDPattern base = LEDPattern::Rainbow(255, 255);
LEDPattern mask =
LEDPattern::Steps(maskSteps).ScrollAtRelativeSpeed(units::hertz_t{0.25});
LEDPattern pattern = base.Mask(mask);
// Apply the LED pattern to the data buffer
pattern.ApplyTo(m_ledBuffer);
// Write the data to the LED strip
m_led.SetData(m_ledBuffer);
Overlay
Overlays can be used to « stack » patterns atop each other, where black pixels (set to Color.kBlack, RGB value #000000) are treated as transparent and allow a lower layer to be displayed. Upper layers are typically combined with masks to set transparent sections; recall that masking a pixel with Color.kBlack will set that pixel to black, which will then be treated by the overlay as transparent.
Blend
Blends will combine the output colors of patterns together, by averaging out the individual RGB colors for every pixel. Like the brightness modifier, this tends to output colors that are more desaturated than its inputs.
Low Level Access
LEDPattern is an easy and convenient way of controlling LEDs, but direct access to the LED colors is sometimes needed for custom patterns and animations.
Color can be set to an individual led on the strip using two methods: setRGB(), which takes RGB values as an input, and setHSV(), which takes HSV values as an input. Low-level access is typically done with an indexed for-loop that iterates over each LED index of the section to control. This method can be used for both AddressableLEDBuffer and AddressableLEDBufferView objects in Java, and for std::span for C++.
Note
RGB stands for Red, Green, and Blue. This is a fairly common color model as it’s quite easy to understand, and it corresponds with a typical LED configuration that’s comprised of one red, one green, and one blue sub-LED. LEDs can be set with the setRGB method that takes 4 arguments: index of the LED, amount of red, amount of green, amount of blue. The amount of red, green, and blue are integer values between 0-255.
Note
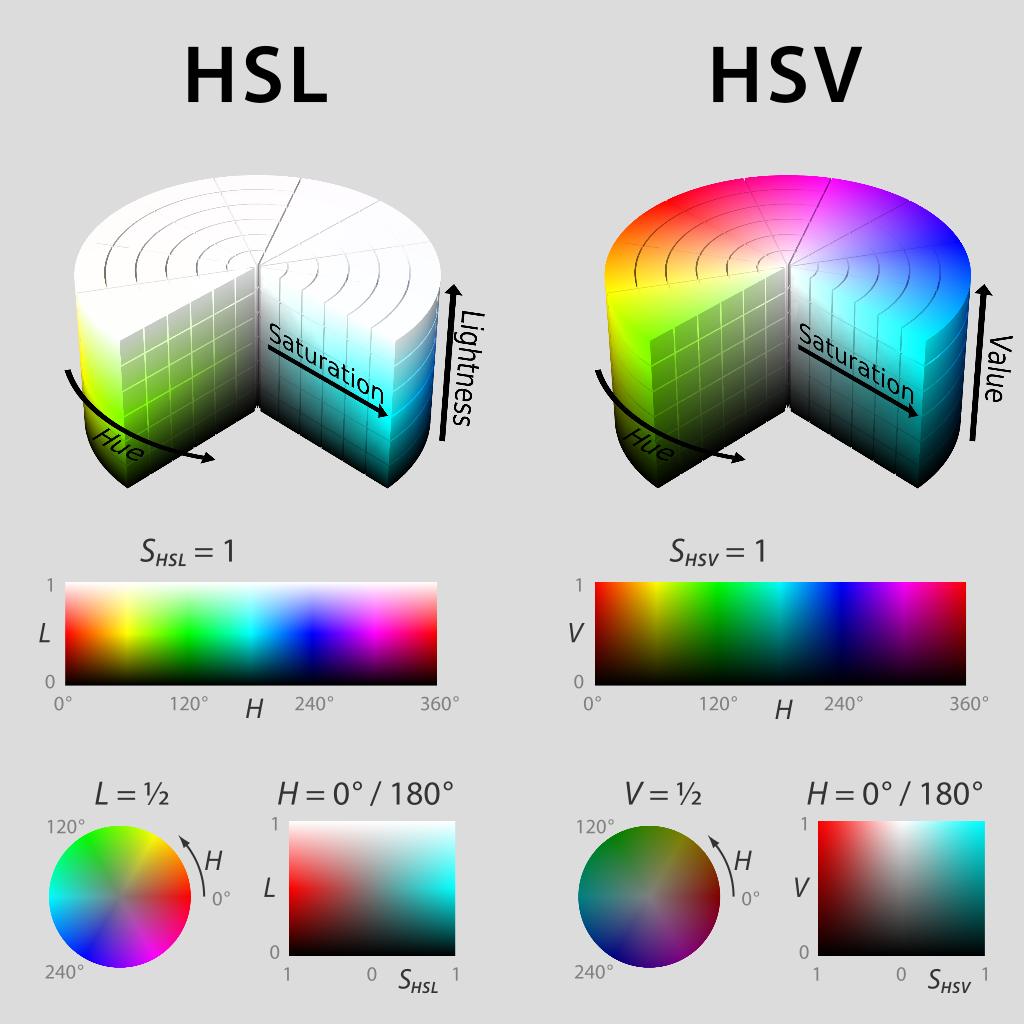
HSV stands for Hue, Saturation, and Value. Hue describes the color or tint, saturation being the amount of gray, and value being the brightness. In WPILib, Hue is an integer from 0 - 180. Saturation and Value are integers from 0 - 255. If you look at a color picker like Google’s, Hue will be 0 - 360 and Saturation and Value are from 0% to 100%. This is the same way that OpenCV handles HSV colors. Make sure the HSV values entered to WPILib are correct, or the color produced might not be the same as was expected.
These examples demonstrate setting an entire LED strip to solid red using the RGB and HSV methods:
for (var i = 0; i < m_ledBuffer.getLength(); i++) {
// Sets the specified LED to the RGB values for red
m_ledBuffer.setRGB(i, 255, 0, 0);
}
m_led.setData(m_ledBuffer);
for (int i = 0; i < kLength; i++) {
m_ledBuffer[i].SetRGB(255, 0, 0);
}
m_led.SetData(m_ledBuffer);
for (var i = 0; i < m_ledBuffer.getLength(); i++) {
// Sets the specified LED to the HSV values for red
m_ledBuffer.setHSV(i, 0, 100, 100);
}
m_led.setData(m_ledBuffer);
for (int i = 0; i < kLength; i++) {
m_ledBuffer[i].SetHSV(0, 100, 100);
}
m_led.SetData(m_ledBuffer);
Utilisation des valeurs HSV