Dépannage du robot
Note
Pendant la Compétition de robotique FIRST, les robots subissent plusieurs chocs lorsqu’ils sont conduits sur le terrain de jeu. Il est donc important de s’assurer que les connexions soient bien ajustées, que les pièces soient boulonnées de manière sécuritaire et que le tout soit assemblé de sorte que le robot ne se brise pas en se déplaçant sur le terrain.
Vérifier les bornes de la batterie et les connexions

Le ruban qui devrait couvrir la connexion de la batterie dans ces exemples a été retirée pour illustrer ce qui se passe. Sur vos robots, les connexions doivent être couvertes.
Faire bouger les connecteurs allant à la batterie dans un mouvement de va-et-vient. Souvent, ceux-ci ce sont desserrés parce que les vis qui les retiennent sont mal vissées, ou parfois le sertissage n’est pas complètement sécure. Cependant, vous ne pouvez que déceler les très mauvais cas de cette manière, car souvent le ruban électrique qui entoure la connexion rigidifie cette dernière, et vous donne un résultat qui semble correct. L’utilisation d’un voltmètre pour déceler les chutes de tension, ou encore du petit gadget appelé Battery Beak, vous aidera à identifier ce problème.
Appliquez une force considérable sur le câble de la batterie à 90 degrés pour essayer de déplacer la direction du câble quittant la batterie, en cas de succès, la connexion n’était pas assez serrée pour commencer et elle devrait être refaite. Cet article contient des informations plus détaillées sur la batterie.
Fixation de la batterie au robot
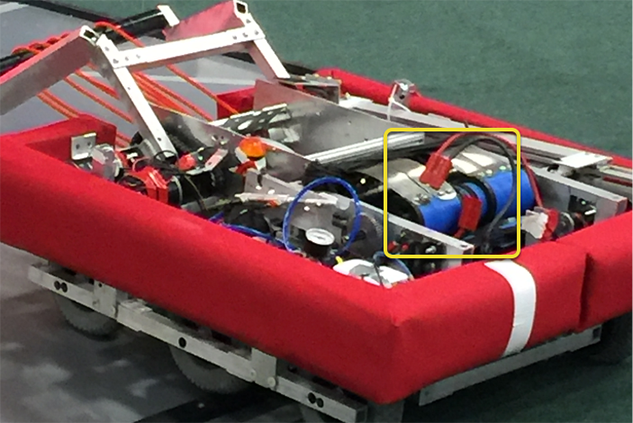
In almost every event we see at least one robot where a not properly secured battery connector (the large Anderson) comes apart and disconnects power from the robot. This has happened in championship matches on the Einstein and everywhere else. Its an easy to ensure that this doesn’t happen to you by securing the two connectors by wrapping a tie wrap around the connection. 10 or 12 tie wraps for the peace of mind during an event is not a high price to pay to guarantee that you will not have the problem of this robot from an actual event after a bumpy ride over a defense. Also, secure your battery to the chassis with hook and loop tape or another method, especially in games with rough defense, obstacles, or climbing.
Sécuriser le connecteur de batterie et les câbles d’alimentation principaux
Un connecteur de batterie desserré (côté robot: le grand Anderson SB) peut tirer les câbles d’alimentation principaux lorsque la batterie est remplacée. Si les fils d’alimentation principaux sont desserrés, cette traction peut se rendre jusqu’aux cosses à sertir attachées au disjoncteur de 120 A ou au panneau de distribution d’alimentation (PDP), plier la cosse et, avec le temps et la fatigue du métal, provoquer la rupture de l’extrémité de la cosse. La mise en place de quelques attaches sur les câbles d’alimentation principaux en les fixant au châssis et le boulonnage du connecteur de batterie côté robot peut empêcher cela et faciliter la connexion de la batterie.
Disjoncteur principal 120A
Note
Assurez-vous que les écrous sont serrés fermement et que le disjoncteur est fixé à un élément rigide.
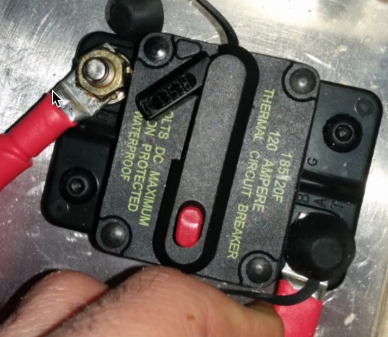

Appliquez une forte force de torsion pour essayer de faire tourner la portion sertie. Si elle tourne, l’écrou n’est pas assez serré. Après avoir serré l’écrou, recommencez le test en essayant à nouveau de faire tourner la partie sertie.
L’écrou d’origine a une rondelle en étoile, qui peut s’user avec le temps: il peut être nécessaire de vérifier celles-ci après quelques matches, en particulier si le connecteur de batterie côté robot n’est pas fixé au châssis.
L’écrou a un filetage 1/4-28, ce qui est relativement rare: assurez-vous que vous avez le bon pas si l’écrou est remplacé.
Parce que le goujon métallique est juste moulé dans le boîtier, de temps en temps, vous pouvez casser le goujon. Ne vous inquiétez pas, remplacez simplement l’assemblage.
Lorsqu’il est soumis à plusieurs saisons de compétition, le disjoncteur principal est sensible aux dommages de fatigue dus aux vibrations et à l’utilisation, et peut commencer à s’ouvrir sous l’impact. Chaque fois que la fonction de fusible thermique est déclenchée, il peut devenir progressivement plus facile de déclencher. De nombreuses équipes de vétérans commencent chaque saison avec un nouveau disjoncteur principal et apportent avec eux des disjoncteurs de rechange.
Panneau de Distribution de Puissance (PDP)
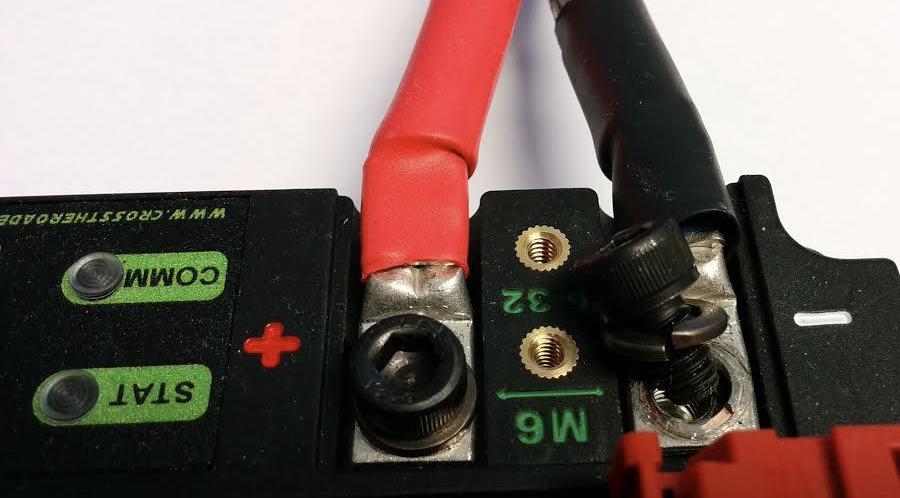
Assurez-vous que des rondelles fendues ont été placées sous les vis du PDP, mais ce n’est pas facile à confirmer visuellement, et parfois vous ne pouvez pas voir. Vous pouvez alors vérifier en retirant le capot sur le boîtier du PDP. De plus, si vous appliquez une pression entre les fils rouge et noir, l’un vers l’autre, vous pouvez parfois déceler les connexions vraiment mal fixées.
Test de robustesse des branchements


Il est important de vérifier les connecteurs de type Weidmuller pour la puissance, la sortie du compresseur, le connecteur d’alimentation roboRIO et l’alimentation de la radio. On a qu’a tirer sur les connexions, comme indiqué. Assurez-vous qu’aucun fil se retire du connecteur.
Recherchez des courts-circuits possibles ou imminents avec des connexions de type Weidmuller qui sont proches les unes des autres et dont la partie dénudée du fil est exposée. Toujours réduire au maximum l’exposition de fils dénudées.
Les connecteurs à fourche peuvent également échouer en raison de sertissages inappropriés, alors testez-les également.
Fusible à lamelles
Assurez-vous de placer le fusible 20A (jaune) à gauche et le fusible 10A (rouge) à droite.


Avertissement
Veillez à ce que les fusibles soient bien insérés dans les porte-fusibles. Les fusibles doivent pénétrer au moins aussi loin que la figure ci-dessous (les fusibles de différentes marques ont des longueurs de lames différentes). Il devrait être presque impossible de retirer le fusible à mains nues (sans utiliser une pince à long bec). Si cela n’est pas fait correctement, le robot et/ou la radio peuvent présenter des problèmes de connectivité intermittents.
Si vous pouvez retirer les fusibles à lame à la main, ils ne sont pas complètement insérés. Assurez-vous qu’ils sont complètement insérés dans le PDP afin qu’ils ne ressortent pas pendant le fonctionnement du robot.
Limaille de fer dans le roboRIO
La limaille est formée de copeaux fins de métal, d’abrasifs ou d’autres matériaux produits par une opération d’usinage. Souvent, des modifications doivent être apportées à un robot après que toute la partie électronique a été installée. Le circuit imprimé du roboRIO est recouvert d’un vernis protecteur, mais cela ne garantit pas de façon absolue que la présence de limaille puisse court-circuiter les traces ou les composants à l’intérieur du boîtier du roboRIO. Dans tous les cas, vous devez veiller à ce qu’aucun copeau de métal, limaille ou autre ne se retrouve dans le roboRIO ou dans l’un des autres composants electronique. En particulier, les connecteurs à 3 broches qui sont exposés en périphérie du roboRIO sont un endroit où les copeaux peuvent entrer dans le boîtier. Un examen approfondi des quatre côtés du boîtier avec une lampe de poche est généralement suffisant pour trouver les très mauvaises cas.
Câble Ethernet
Si le câble Ethernet RIO vers radio ne contient pas le clip qui verrouille le connecteur, procurez-vous un autre câble. C’est un problème courant qui se produit plusieurs fois dans chaque compétition. Assurez-vous que vos câbles sont sécurisés. Le clip se rompt souvent, en particulier lorsque le câble reste accroché lors de l’assemblage électrique.
Câbles relâchés
Cables must be tightened down, particularly the radio power and ethernet cable.
Le câble Ethernet est également assez lourd, s’il est autorisé à pivoter librement, le clip en plastique peut ne pas être suffisant pour maintenir les connecteurs à broches Ethernet en circuit.
Reproduire un problème dans le puits.
Au-delà des secousses normales des câbles pendant que le robot est alimenté et attaché, il est suggéré qu’un côté du robot soit levé de quelques centimètres, puis de le laisser retomber afin de lui infliger une secousse. La conduite sur le terrain, en particulier contre les défenseurs, sera souvent très violente, ce qui permet de s’assurer que rien ne tombe ou se brise. Il vaut mieux que le robot échoue dans le puits plutôt qu’au milieu d’un match.
Lorsque vous effectuez ce test, il est important d’être connecté via Ethernet et non par USB, sinon vous ne testez pas tous les chemins critiques.
Vérification des logiciels embarqués (Firmware) et des versions
Les inspecteurs de robots font cela, mais vous devriez le faire aussi, cela aide les inspecteurs de robots et ils l’apprécient. Et cela garantit que vous utilisez le code le plus récent, avec un minimum de bogues. Vous ne voulez pas perdre une partie à cause d’un logiciel de système de contrôle obsolète sur votre robot!
Vérification de la station de pilotage
Nous observons souvent des problèmes avec la station de pilotage. Vous devez:
Apporter TOUJOURS le câble d’alimentation de l’ordinateur portable sur le terrain, peu importe l’état de sa batterie, vous êtes toujours autorisé à le brancher sur le terrain.
Vérifier les paramètres d’alimentation et de veille, désactivez la veille et la mise en veille prolongée, les économiseurs d’écran, etc.
Désactiver l’alimentation des ports USB (dev manager)
Désactiver l’alimentation des ports Ethernet (dev manager)
Désactiver l’antivirus Windows Defender
Désactiver le pare-feu
Fermez toutes les applications à l’exception de DS/Dashboard lorsque vous êtes sur le terrain.
Vérifiez qu’il n’y a rien d’inutile en cours d’exécution dans la barre d’applications dans le menu Démarrer (en bas à droite)
Outils pratiques

Il ne semble jamais y avoir assez de lumière à l’intérieur des robots, du moins pas assez pour scruter les points de connexion critiques, alors pensez à utiliser une lampe de poche LED pour inspecter les connexions de votre robot. Ils sont disponibles chez Home Depot ou dans tout magasin de quincaillerie/automobile.
Un outil WAGO est un bel outil pour refaire les connexions Weidmuller avec des fils multibrins. Souvent, je vais faire une démonstration d’un raccord pour montrer à l’équipe, puis leur faire faire le reste en utilisant l’outil WAGO pour appuyer sur le piston blanc pendant qu’ils insèrent le fil multibrins. L’angle de l’outil WAGO rend cela particulièrement utile.