Referencia rápida del estado de la luz
Muchos de los componentes del sistema de control de FRC® tienen luces indicadoras que se pueden usar para diagnosticar rápidamente los problemas con su robot. Esta guía muestra cada uno de los componentes de hardware y describe el significado de los indicadores. Fotos e información de Innovation FIRST y Cross the Road Electronics.
A compact and printable Status Light Quick Reference is available.
Luz de señal de robot (RSL)

Encendido fijo |
Robot encendido y deshabilitado |
Parpadeando |
Robot encendido y habilitado |
Apagado |
Robot apagado, roboRIO no encendido o RSL no cableado correctamente |
roboRIO

Power |
Verde |
La energía está bien |
|
Ámbar |
Protección contra apagones activada, salidas desactivadas |
||
Rojo |
Fallo de energía, revise los rieles del usuario para ver si hay cortocircuitos |
||
Status |
Encendido mientras el controlador se está iniciando, luego debería apagarse |
||
2 parpadeos |
Error de software, reimagen de roboRIO |
||
3 parpadeos |
Modo seguro, reinicie roboRIO, vuelva a crear una imagen si no se resuelve |
||
4 parpadeos |
El software se bloqueó dos veces sin reiniciar, reinicie roboRIO, vuelva a crear una imagen si no se resuelve |
||
Parpadeo constante o fijo |
Error irrecuperable |
||
Radio |
No implementado actualmente |
||
Comm |
Apagado |
Sin comunicacion |
|
Rojo sólido |
Comunicación con DS, pero sin código de usuario en ejecución |
||
Parpadeando rojo |
Paro de emergencia activado |
||
Verde sólido |
Buena comunicación con DS |
||
Mode |
Apagado |
Salidas deshabilitadas (robot deshabilitado, apagón, etc.) |
|
Naranja |
Autónomo Habilitado |
||
Verde |
Teleoperado Habilitado |
||
Rojo |
Test Habilitado |
||
RSL |
Ver arriba <#robot-signal-light-rsl> _ |
||
Vivid-Hosting VH-109 Radio

Energía |
Verde |
Encendido o encendiendo |
Apagado |
No Power |
|
System Status |
Verde |
Able to ping the field |
Blinking (1Hz) |
Unable to ping the field |
|
Blinking (20Hz) |
Firmware being flashed |
|
Blinking (50Hz) |
Performing «first boot» |
|
Apagado |
Booting Up |
|
2.4 GHz |
Verde |
Wifi available |
Blinking (20Hz) Sys Blinking |
Battery detected, Wireless is disabled |
|
6 GHz |
Solid Blue |
6 GHz connection made |
Blinking (20Hz) Sys Blinking |
Battery detected, Wireless is disabled |
Panel de distribución de energía

Estatus PDP/Comm LEDs
LED |
Estroboscópico |
Lento |
|---|---|---|
Verde |
Sin fallas: robot habilitado |
Sin fallas: robot deshabilitado |
Naranja |
NA |
Falla pegajosa |
Rojo |
NA |
Sin comunicación CAN |
Truco
Si un LED del PDP muestra más de un color, consulte la tabla de estados especiales de LED del PDP a continuación. Para obtener más información sobre la resolución de fallas del PDP, consulte el Manual de usuario del PDP.
Nota
Note that the No CAN Comm fault will occur if the PDP cannot communicate with the roboRIO via CAN Bus.
Estados especiales del PDP
Colores LED |
Problema |
|---|---|
Rojo/Naranja |
Hardware dañado |
Verde/Naranja |
En el cargador de arranque |
Sin LED |
Sin energía / Polaridad incorrecta |
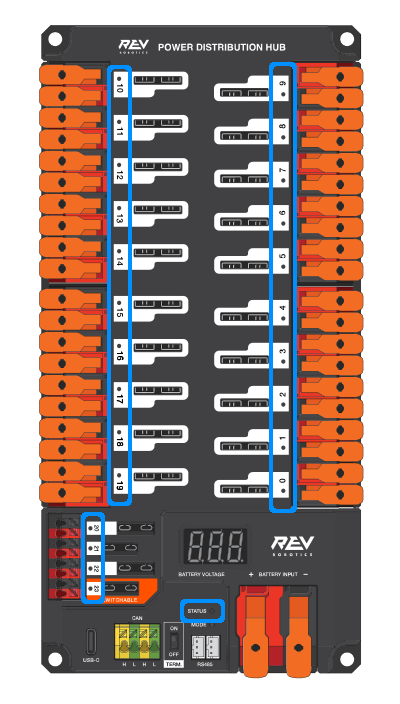
Power Distribution Hub
Nota
Esos patrones de led solo aplican a la versión de firmware 21.1.7 y superiores
LED del estado de PDH
Color de LED |
Estado |
|---|---|
Azul sólido |
Dispositivo encendido pero comunicación no establecida |
Verde sólido |
Comunicacion Principal con roboRIO establecida |
Magenta Parpadeando |
Mantener con vida el tiempo de espera |
Solid Cyan |
Secondary Heartbeat (Connected to REV Hardware Client) |
Naranja/Azul parpadeando |
Bateria baja |
Naranja/Amarillo parpadeando |
falla en CAN |
Naranja/Cian parpadeando |
falla del Hardware |
Naranja/Rojo parpadeando |
A prueba de fallos |
Naranja/Magenta parpadeando |
Dispositivo sobre corriente |
Channel LEDs
Color de LED |
Estado |
|---|---|
Apagado |
El canal tiene voltaje y está operando como se esperaba |
Rojo sólido |
Channel has NO voltage and there is an active fault. Check for tripped or missing circuit breaker / fuse |
Parpadeando rojo |
Sticky fault on the channel. Check for tripped circuit breaker / fuse. |
Módulo regulador de voltaje

Los LED de estado del VRM indican el estado de las dos fuentes de alimentación. Si el suministro funciona correctamente, el LED debe iluminarse en verde brillante. Si el LED no está encendido o está apagado, la salida puede estar en cortocircuito o consumir demasiada corriente.
Módulo de control neumático (PCM)

PCM Estado del LED
LED |
Estroboscópico |
Lento |
Largo |
|---|---|---|---|
Verde |
No se ha activado ningún fallo en el robot |
Falla pegajosa |
NA |
Naranja |
NA |
Falla pegajosa |
NA |
Rojo |
NA |
No hay comunicación con el CAN o hay fallo del solenoide (parpadea índice de solenoides) |
Fallo del Compresor |
Truco
Sí un LED en el PCM muestra más de un color, vea la tabla de los diferentes estados especiales del LED del PCM la cual se encuentra abajo. Para más información sobre cómo resolver errores del PCM, consulte el manual de usuario del PCM.
Nota
Tome en cuenta que el fallo de la comunicación del CAN no se producirá solo sí el dispositivo no puede comunicarse con cualquier otro dispositivo, si el PCM y la PDP pueden comunicarse entre sí, pero no con la roboRIO.
Tabla de estados especiales LED del PCM
LED |
Problemas |
|---|---|
Rojo/Naranja |
Hardware dañado |
Verde/Naranja |
En el cargador de arranque |
Sin LED |
No hay energía / Polaridad incorrecta |
PCM LED del compresor
Este es el LED del compresor. Este LED es verde cuando la salida del compresor está activa (actualmente el compresor se encuentra encendido) y se apaga cuando la salida del compresor no está activa.
LEDs del canal de solenoide PCM
Estos LEDs se encienden en rojo si el canal del solenoide está activado y no se encienden si está desactivado.
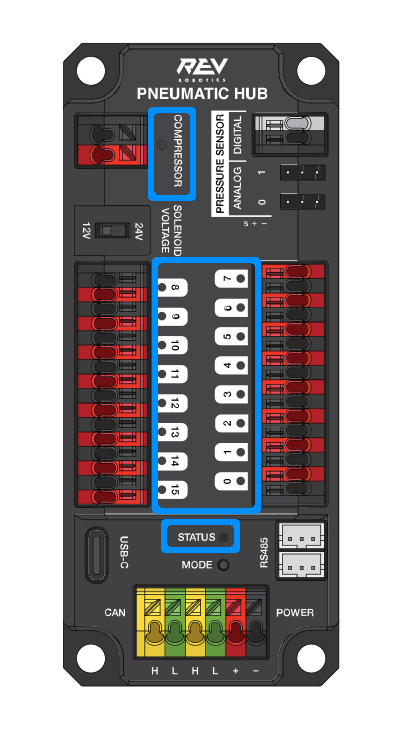
Pneumatic Hub
Nota
Esos patrones de led solo aplican a la versión de firmware 21.1.7 y superiores
Pneumatic Hub Status LED
Color de LED |
Estado |
|---|---|
Azul sólido |
Dispositivo encendido pero comunicación no establecida |
Verde sólido |
Main Communication established |
Magenta Parpadeando |
Mantener con vida el tiempo de espera |
Solid Cyan |
Secondary Heartbeat (connected to REV HW Client) |
Naranja/Azul parpadeando |
falla del Hardware |
Naranja/Amarillo parpadeando |
falla en CAN |
Naranja/Rojo parpadeando |
A prueba de fallos |
Naranja/Magenta parpadeando |
Dispositivo sobre corriente |
Orange/Green Blinking |
Compressor Over Current |
Compressor LED
Color de LED |
Estado |
|---|---|
Verde sólido |
Compressor On |
Black Solid |
Compressor Off |
Solenoid LEDs
Color de LED |
Estado |
|---|---|
Verde sólido |
Solenoid On |
Black Solid |
Solenoid Off |
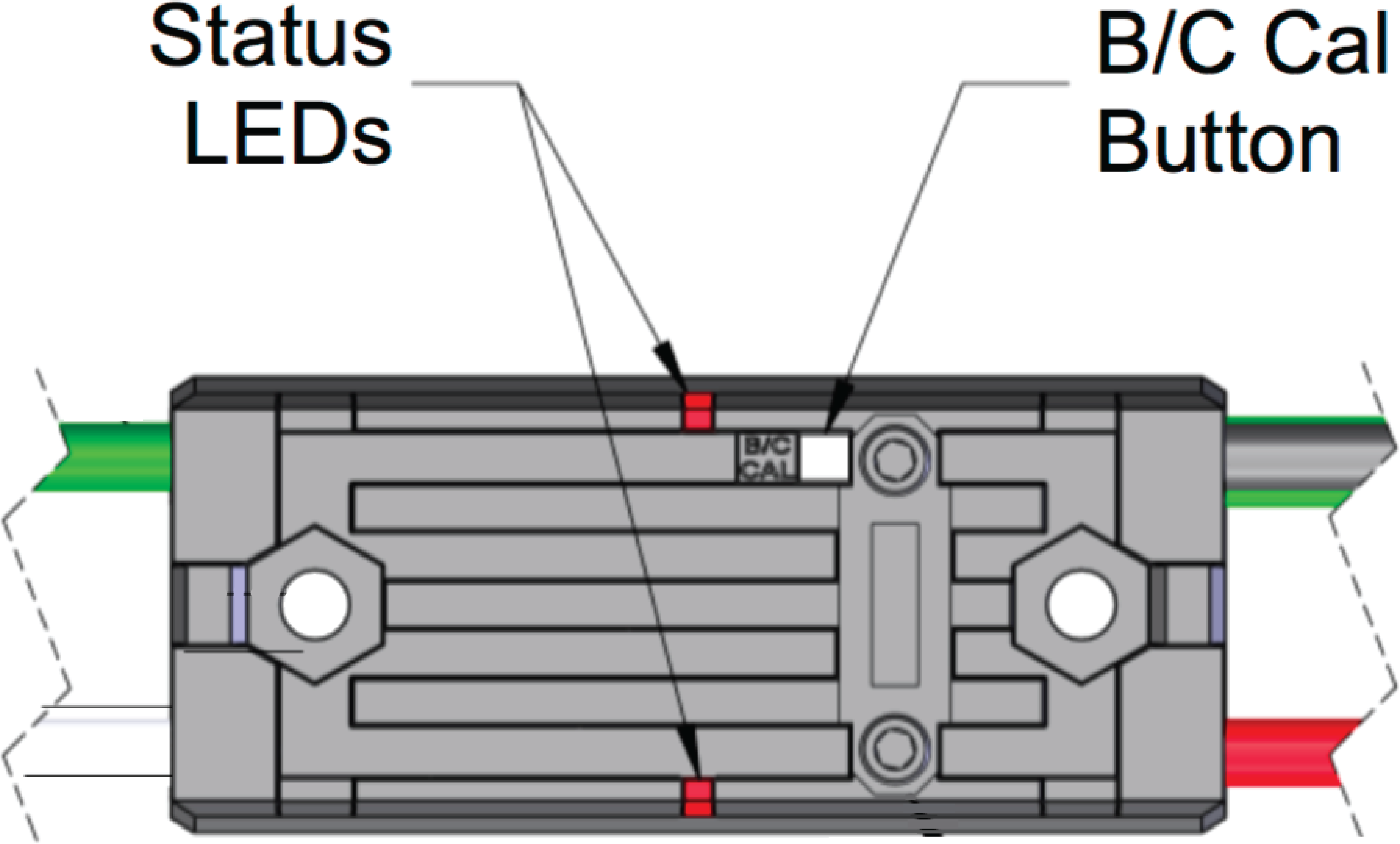
Talon SRX & Victor SPX Motor Controllers
These motor controllers use Phoenix 5. For the most up-to-date information, see the CTRE Phoenix 5 Documentation.
Talon SRX/Victor SPX Status LEDs During Normal Operation
LEDs |
Colores |
Device State |
|---|---|---|
Ambos |
Parpadeando verde |
Se aplica el acelerador de avance. La tasa de parpadeo es proporcional al ciclo de trabajo. |
Ambos |
Parpadeando rojo |
Se aplica el acelerador en reversa. La tasa de parpadeo es proporcional al ciclo de trabajo. |
Ninguno |
Ninguno |
No power is being applied |
LEDs alternando |
Apagado/Naranja |
Bus CAN detectado, robot desactivado |
LEDs alternando |
Apagado/Rojo lento |
Bus CAN/PWM no es detectado |
LEDs alternando |
Apagado/Rojo rápido |
Falla detectada |
LEDs alternando |
Rojo/Naranja |
Hardware dañado |
LEDs estroboscopio hacia (M-) |
Apagado/Rojo |
Interruptor de límite de avance o límite suave de avance |
LEDs estroboscopio hacia (M+) |
Apagado/Rojo |
Interruptor de límite inverso o límite suave inverso |
Solo LED1 (el más cercano a M+/V+) |
Verde/Naranja |
In Boot-loader |
Talon SRX/Victor SPX Status LEDs During Calibration
Status LEDs Blink Code |
Device State |
|---|---|
Rojo/Verde intermitente |
Modo de calibración |
Parpadeando verde |
Calibración exitosa |
Parpadeando rojo |
Calibración fallida |
Talon SRX/Victor SPX B/C CAL Blink Codes
B/C CAL Color del botón |
Device State |
|---|---|
Rojo |
Modo Brake |
Apagado |
Modo Coast |
Talon FX Motor Controller
The Talon FX uses Phoenix 6. For the most up-to-date information, see the CTRE Phoenix 6 Documentation.
Talon FX Status LEDs
Estado del LED |
Meaning |
|---|---|
LEDs Off |
No Power |
Blinking Alternating Red |
No valid CAN/PWM signal |
Blinking Alternating Orange |
CAN detected but no Phoenix running |
Blinking Simultaneous Orange |
Valid CAN signal, device disabled |
Both Solid Orange |
Enabled with neutral output |
Blinking Simultaneous Red |
Driving in reverse |
Blinking Simultaneous Green |
Driving forward |
Offset Alternating Red/Off |
Device limit reached |
Offset Orange/Off |
Thermal cutoff |
Alternate Red/Green |
Pro-only command while unlicensed |
Alternate Red/Orange |
Hardware dañado |
Single LED alternates Green/Orange |
Device in bootloader |
Talon FX B/C CAL Blink Codes
B/C CAL Color del botón |
Device State |
|---|---|
Rojo |
Modo Brake |
Apagado |
Modo Coast |
Controlador de Motor SPARK-MAX

REV Robotics SPARK

Controlador de Motor Victor-SP
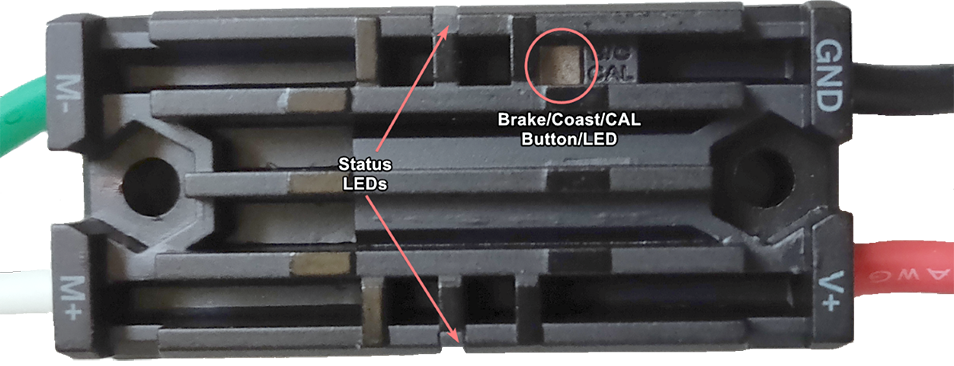
Brake/Coast/Cal Button/LED – Rojo sí el controlador está en modo brake, apagado sí el controlador está en modo coast.
Estado
Verde |
Sólido |
Salida hacia adelante completa |
Parpadeando |
Hacia adelante proporcional al voltaje de salida |
|
Rojo |
Sólido |
Salida en reversa completa |
Parpadeando |
Hacia adelante proporcional al voltaje de salida |
|
Naranja |
Sólido |
Estado desactivado, señal PWM perdida, robot FRC desactivado, o señal en rango muerto (+/- 4% de salida) |
Rojo/Verde |
Parpadeando |
Listo para la calibración. Varios parpadeos verdes indican una calibración exitosa, y rojo varias veces indica una calibración fallida. |
Controlador de Motor Talon

Verde |
Sólido |
Salida hacia adelante completa |
Parpadeando |
Hacia adelante proporcional al voltaje de salida |
|
Rojo |
Sólido |
Salida en reversa completa |
Parpadeando |
En reversa proporcional al voltaje de salida |
|
Naranja |
Sólido |
No hay dispositivos CAN conectados |
Parpadeando |
Estado desactivado, señal PWM perdida, robot FRC desactivado, o señal en rango muerto (+/- 4% de salida) |
|
Apagado |
No hay energía de entrada al Talon |
|
Rojo/Verde |
Parpadeando |
Listo para la calibración. Varios parpadeos verdes indican una calibración exitosa, y rojo varias veces indica una calibración fallida. |
Controlador de motor de veneno

REV Robotics Módulo de Energía de Servo
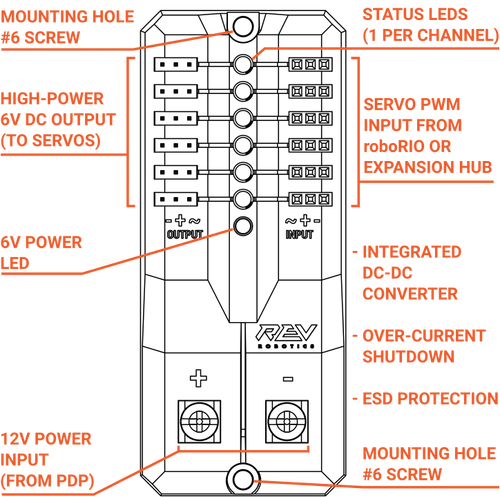
Status LEDs
Each channel has a corresponding status LED that will indicate the sensed state of the connected PWM signal. The table below describes each state’s corresponding LED pattern.
Estado |
Patrón |
|---|---|
No hay señal |
Ámbar parpadeante |
Señal de Izquierda/Reversa |
Rojo |
Señal Central/Neutral |
Ámbar |
Señal de Derecha/Adelante |
Verde |
6V Power LED off, dim, or flickering with power applied = Over-current shutdown
REV Robotics Servo Hub
REV Servo Hub Status LED Patterns
General Status LED
Color de LED |
Estado |
|---|---|
Magenta Parpadeando |
Powered on but not connected to a controller or the REV Hardware Client |
Azul sólido |
Connected to REV Hardware Client |
Solid Cyan |
Connected to a roboRIO or CAN controller |
Verde sólido |
Connected to a Control Hub or RS-485 controller |
Naranja/Cian parpadeando |
Battery voltage is lower than 5.5V |
Naranja/Amarillo parpadeando |
CAN fault detected |
Naranja/Magenta parpadeando |
Overcurrent fault |
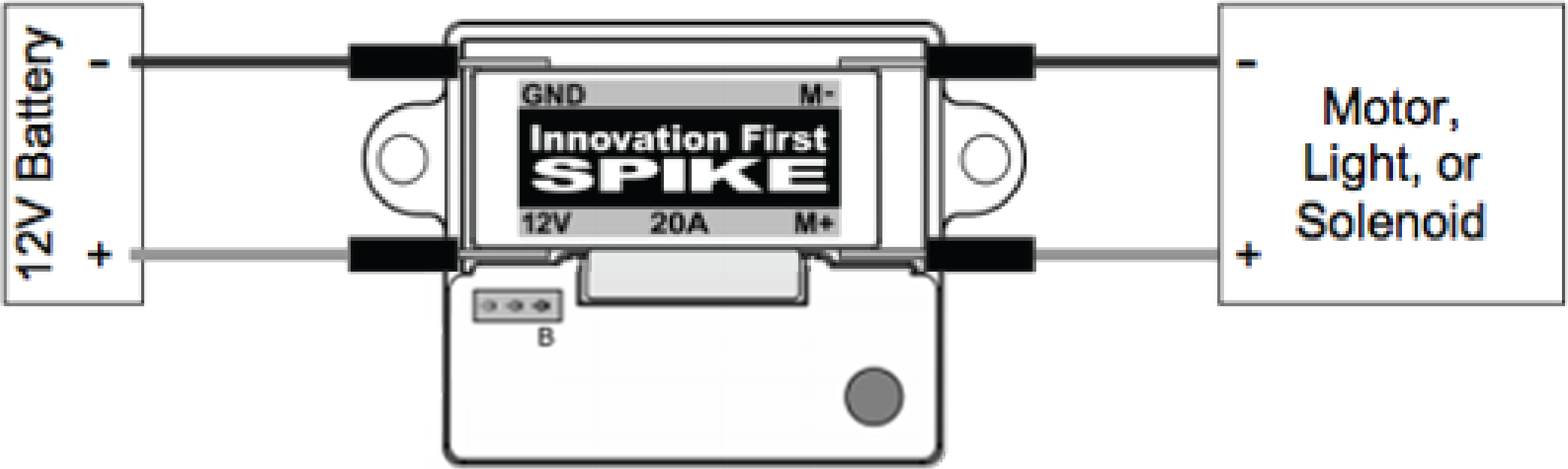
Revelador Spike configurado como motor, luz o interruptor solenoide.
Inputs |
Outputs |
Indicator |
Motor Function |
||
Forward (White) |
Reverse (Red) |
M+ |
M- |
||
Apagado |
Apagado |
GND |
GND |
Naranja |
Condición de apagado/frenado (por defecto) |
Encendido |
Apagado |
+12v |
GND |
Verde |
El motor gira en una dirección |
Apagado |
Encendido |
GND |
+12v |
Rojo |
El motor gira en dirección opuesta |
Encendido |
Encendido |
+12v |
+12v |
Apagado |
Condición de apagado/frenado |
Nota
“Condición de frenado” Se refiere a la parada dinámica del motor debido al cortocircuito de las entradas del motor. Esta condición no es opcional cuando se va a un estado desactivado.
Relevador Spike configurado para uno o dos solenoides.

Inputs |
Outputs |
Indicator |
Motor Function |
||
Forward (White) |
Reverse (Red) |
M+ |
M- |
||
Apagado |
Apagado |
GND |
GND |
Naranja |
Ambos solenoides apagados (por defecto) |
Encendido |
Apagado |
+12v |
GND |
Verde |
El solenoide conectado a M+ está encendido |
Apagado |
Encendido |
GND |
+12v |
Rojo |
El solenoide conectado a M- está encendido |
Encendido |
Encendido |
+12v |
+12v |
Apagado |
Ambos solenoides encendidos |
CANCoder Encoder

Color de LED |
LED Brightness |
CAN Bus detection |
Magnet Field Strength |
Description |
|---|---|---|---|---|
Apagado |
Apagado |
CANCoder is not powered |
||
Yellow/Green |
Bright |
Device is in boot-loader. See user manual for more information. |
||
Slow Red Blink |
Bright |
CAN bus has been lost |
||
Rapid Red Blink |
Dim |
CAN bus never detected since boot |
Magnet is out of range (<25mT or >135mT) |
|
Rapid Yellow Blink |
Magnet in range with slightly reduced accuracy (25-45mT or 75-135mT) |
|||
Rapid Green Blink |
Magnet in range (between 45mT - 75mT) |
|||
Rapid Red Blink |
Bright |
CAN bus present |
Magnet is out of range (<25mT or >135mT) |
|
Rapid Yellow Blink |
Magnet in range with slightly reduced accuracy (25-45mT or 75-135mT) |
|||
Rapid Green Blink |
Magnet in range (between 45mT - 75mT) |
CANivore
