Soluciones para prevenir problemas del robot
Nota
En FIRST® Robotics Competition, los robots soportan mucha presión mientras son conducidos en el campo. Es importante asegurarse de que las conexiones estén bien sujetadas, las piezas estén atornilladas de forma segura en su lugar y que todo está sujetado para que un robot que este en constante movimiento no se rompa.
Revise las conexiones de la batería

La cinta que debería cubrir la conexión de la batería en estos ejemplos se ha retirado para ilustrar lo que ocurre. En sus robots, las conexiones deberían estar cubiertas.
Mueva el conector del arnés de la batería. A menudo están sueltos porque los tornillos se aflojan, o a veces no está completamente atornillado. Sin embargo, sólo atraparás a los realmente malos porque a menudo la cinta eléctrica endurece la conexión hasta un punto en el que se siente rígida. Usar un voltímetro o un pico de batería ayudará con esto.
Aplique una fuerza considerable sobre el cable de la batería a 90 grados para tratar de mover la dirección del cable que sale de la batería, si tiene éxito la conexión no estaba lo suficientemente apretada para empezar y debe ser rehecha. Este article has more detailed battery information.
Asegurar la batería del robot
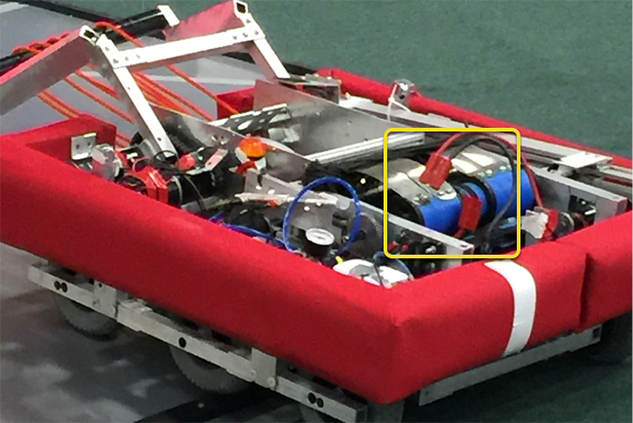
In almost every event we see at least one robot where a not properly secured battery connector (the large Anderson) comes apart and disconnects power from the robot. This has happened in championship matches on the Einstein and everywhere else. Its an easy to ensure that this doesn’t happen to you by securing the two connectors by wrapping a tie wrap around the connection. 10 or 12 tie wraps for the peace of mind during an event is not a high price to pay to guarantee that you will not have the problem of this robot from an actual event after a bumpy ride over a defense. Also, secure your battery to the chassis with hook and loop tape or another method, especially in games with rough defense, obstacles, or climbing.
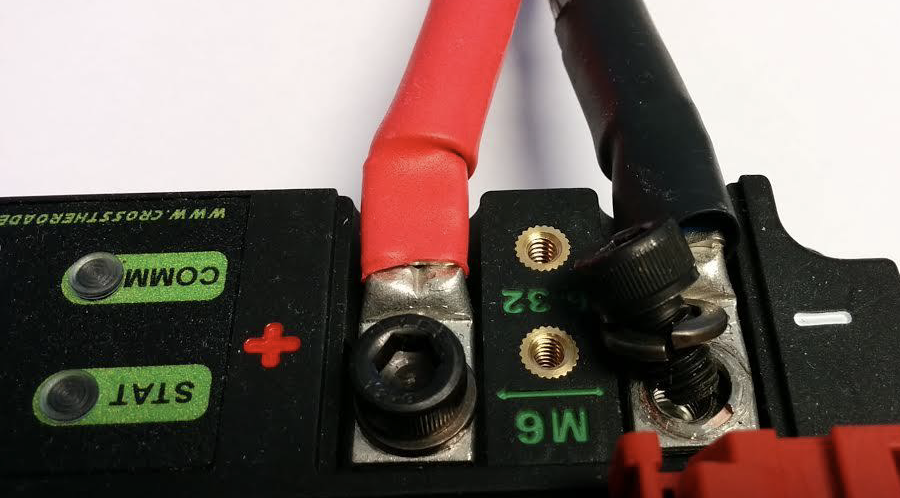
Cómo asegurar el conector de la batería y los cables de alimentación principales
Un conector de la batería del lado del robot que esté suelto (el Anderson SB grande) puede permitir que los cables de alimentación principal sean tirados cuando se reemplaza la batería. Si los cables de alimentación principal están sueltos, ese «tirón» puede llegar hasta los terminales de engarce conectados al disyuntor de 120 amperios o al panel de distribución de energía (PDP), doblar el terminal y, con el tiempo, hacer que el extremo del terminal se rompa por la fatiga. Colocar un par de cintas de sujeción que unan los cables de alimentación principal al chasis y atornillar el conector de la batería del lado del robot puede evitar esto, así como facilitar la conexión de la batería.
Interruptor principal (disyuntor de 120 amperios)
Nota
Asegúrese de que las tuercas estén firmemente apretadas y que el interruptor esté unido a un elemento rígido.
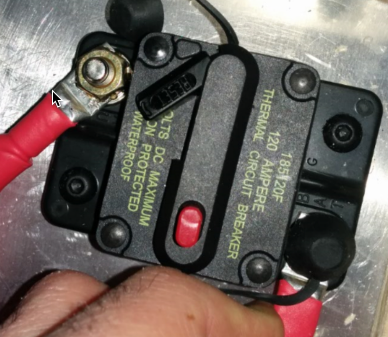

Aplique una fuerte fuerza de torsión para intentar girar la orejeta engarzada. Si el terminal gira, la tuerca no está suficientemente apretada. Después de apretar la tuerca, vuelva a probar intentando girar el terminal.
La tuerca original tiene un cierre en estrella, que puede desgastarse con el tiempo: es posible que haya que revisarla cada cierto tiempo, especialmente si el conector de la batería del lado del robot no está unido al chasis.
La tuerca suele tener una rosca relativamente poco común de 1/4-28: asegúrese de que es correcta si se sustituye la tuerca.
Debido a que el perno metálico sólo está moldeado en la caja, de vez en cuando se puede romper el perno. No se estrese, simplemente sustituya el conjunto.
Cuando se somete a varias temporadas de competencia, el disyuntor principal es susceptible de sufrir daños por fatiga a causa de las vibraciones y el uso, y puede empezar a abrirse con el impacto. Cada vez que se dispara la función de fusible térmico, puede ser progresivamente más fácil que se dispare. Muchos equipos veteranos comienzan cada temporada con un disyuntor principal nuevo y llevan repuestos.
Panel de distribución de energía (PDP)
Asegúrate de que las arandelas de separación se colocaron bajo los tornillos del PDP, pero no es fácil de confirmar visualmente, y a veces no se puede. Puede comprobarlo quitando el estuche. También si aprietas los cables rojos y negros juntos, a veces puedes atrapar las conexiones perdidas.
Prueba de tirón


Los contactos de Weidmuller para la energía, la salida del compresor, el conector de energía del roboRIO y la energía de radio son importantes, para verificar estire las conexiones como se muestra. Asegúrese de que ninguna de las conexiones se separe.
Busque los posibles o inminentes cortos con conexiones Weidmuller que estén cerca una de la otra, y que tengan longitudes de cable demasiado largas (cables que se pelan extra largos).
Los conectores de pala también pueden fallar debido a ajustes inadecuados, así que también hay que probarlos.
Fusibles de cuchilla
Asegúrate de colocar el fusible 20 A (amarillo) a la izquierda y el fusible 10 A (rojo) a la derecha.


Advertencia
Asegúrese de que los fusibles estén completamente colocados en los portafusibles. Los fusibles deben llegar al menos hasta la figura que se muestra a continuación (diferentes marcas de fusibles tienen diferentes longitudes de plomo). Debería ser casi imposible quitar el fusible con las manos (sin el uso de pinzas). Sí no se hace correctamente, el robot / radio puede presentar intermitentes problemas de conectividad.
Si usted puede quitar los fusibles a mano, entonces no están completamente dentro. Asegúrese de que estén completamente colocados en el PDP para que no se salgan durante la operación del robot.
Viruta de la roboRIO
La viruta son chips finos o limadura fina de piedra, metal u otro material producido por una operación de mecanizado. A menudo se deben realizar modificaciones en un robot mientras las piezas del sistema de control están en su lugar. La placa de circuito para el roboRIO está recubierta de forma conforme, pero eso no garantiza absolutamente que las virutas de metal no provoquen un cortocircuito en los rastros o componentes dentro de la caja. En este caso debe tener cuidado de que ninguno de los chips termine en el roboRIO o en cualquiera de los otros componentes. En particular, los 3 cabezales de alfiler expuestos son un lugar donde los chips pueden entrar en la caja. Un rápido vistazo a cada uno de los cuatro lados con una linterna suele ser suficiente para encontrar las áreas realmente malas de infiltración.
Cable Ethernet
Si al cable RIO que va al cable de radio Ethernet le falta el clip que bloquea al conector, consiga otro cable. Este es un problema común que ocurrirá varias veces en cada competencia. Asegúrese de que los cables estén seguros. El clip a menudo se rompe, especialmente cuando se tira de el a través de un camino estrecho, se engancha en algo y luego se rompe.
Cables sueltos
Cables must be tightened down, particularly the radio power and ethernet cable.
El cable de Ethernet también es bastante pesado, si se permite que oscile libremente, el clip de plástico pude no ser suficiente para sostener los conectores de pines Ethernet en el circuito.
Problemas de transmisión en el Pit
Más allá de la sacudida normal mientras que el robot está encendido y atado, se sugiere que se levante y se deje caer un lado del robot. Conducir en el campo, especialmente contra los defensores, será a menudo muy violento, y esto ayuda a asegurar que nada se caiga. Es mejor que el robot falle en los pits que en medio de un partido.
Cuando se hace esta prueba es importante estar conectado a un Ethernet y no a un USB, de lo contrario no se están probando todas las trayectorias.
Revise el Firmware y las versiones
Los inspectores de robot hacen esto, pero usted también debería hacerlo, ayude a los inspectores de robot y ellos lo apreciarán. Y garantiza que está corriendo con el código más reciente, corregido de errores. No querrá perder una partida por un software de sistema de control anticuado en su robot.
Revisión del Driver Station
A menudo se observan problemas con la Driver Station. Usted debe:
SIEMPRE llevar el cargador de la laptop al campo, no importa lo buena que sea la batería, puede enchufarlo en el campo.
Check the power and sleep settings, turn off sleep and hibernate, screen savers, etc.
Turn off power management for USB devices (dev manager)
Apagar la distribución de energía para los puertos Ethernet (dev manager).
Apagar Windows defender.
Apagar el firewall
Cerrar todas las aplicaciones excepto DS/Dashboard cuando se esté en el campo.
Verifique que no haya nada innecesario corriendo en la bandeja de aplicaciones en el menú de inicio (abajo a la derecha).
Herramientas útiles

Parece que nunca hay suficiente luz dentro de los robots, al menos no la suficiente para inspeccionar los puntos de conexión críticos, así que considere usar una linterna LED de mano para inspeccionar las conexiones de su robot. Están disponibles en Home Depot o en cualquier ferretería o tienda de autoservicio.
Una herramienta de WAGO es una buena herramienta para rehacer las conexiones de Weidmuller con cables trenzados. A menudo hago una para mostrar al equipo, y luego hago que hagan el resto con la herramienta de WAGO para presionar el botón blanco mientras insertan el cable trenzado. El ángulo de la herramienta WAGO hace que esto sea particularmente útil.