RobotBuilder tarafından Oluşturulan Kod
RobotBuilder Tarafından Oluşturulan Bir Projenin Düzeni
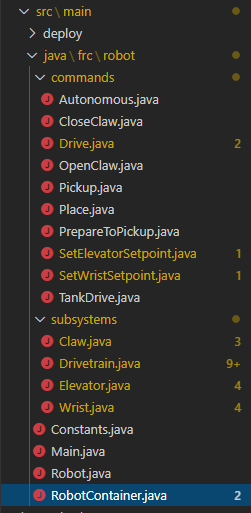

RobotBuilder tarafından oluşturulan bir proje, bir paket (Java’da) veya Komutlar için bir klasör (C ++ ‘da) ve Alt Sistemler için bir diğerinden oluşur. Her komut veya alt sistem nesnesi bu kaplar altında saklanır. Projenin en üst seviyesinde robot ana programını bulacaksınız (RobotContainer.java/C++).
Komut Tabanlı bir robotun organizasyonu hakkında daha fazla bilgi için, bakınız Komut Tabanlı Bir Robot Projesi Yapılandırma
Otomatik Oluşturulan Kod
// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
m_chooser.setDefaultOption("Autonomous", new Autonomous());
// END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
SmartDashboard.putData("Auto Mode", m_chooser);
// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
m_chooser.SetDefaultOption("Autonomous", new Autonomous());
// END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
frc::SmartDashboard::PutData("Auto Mode", &m_chooser);
Robot açıklaması değiştirildiğinde ve kod yeniden dışa aktarıldığında, RobotBuilder dosyada yaptığınız değişiklikleri koruyacak ve böylece kodunuzu koruyacak şekilde tasarlanmıştır. Bu, RobotBuilder’ı tam bir yaşam döngüsü aracı yapar. RobotBuilder hangi kodun değiştirilmesinin uygun olduğunu bilmek için, bazı özel yorumlarla sınırlandırılarak potansiyel olarak yeniden yazılması gereken bölümler oluşturur. Bu yorumlar yukarıdaki örnekte gösterilmektedir. Bu yorum bloklarına herhangi bir kod eklemeyin, projenin RobotBuilder’dan bir sonraki dışa aktarılışında yeniden yazılacaktır.
Bu bloklardan birinin içindeki kodun değiştirilmesi gerekiyorsa, yorumlar kaldırılabilir, ancak bu daha sonra başka güncellemelerin yapılmasını önleyecektir. Yukarıdaki örnekte, //BEGIN ve //END açıklamaları kaldırıldıysa, daha sonra RobotBuilder’a başka bir gerekli alt sistem eklendi, sonraki dışa aktarmada oluşturulmayacaktı.
// ROBOTBUILDER TYPE: Robot.
// ROBOTBUILDER TYPE: Robot.
Additionally, each file has a comment defining the type of file. If this is modified or deleted, RobotBuilder will completely regenerate the file deleting any code added both inside and outside the AUTOGENERATED CODE blocks.
Ana Robot Programı
11// ROBOTBUILDER TYPE: Robot.
12
13package frc.robot;
14
15import edu.wpi.first.hal.FRCNetComm.tInstances;
16import edu.wpi.first.hal.FRCNetComm.tResourceType;
17import edu.wpi.first.hal.HAL;
18import edu.wpi.first.wpilibj.TimedRobot;
19import edu.wpi.first.wpilibj2.command.Command;
20import edu.wpi.first.wpilibj2.command.CommandScheduler;
21
22/**
23 * The methods in this class are called automatically corresponding to each mode, as described in
24 * the TimedRobot documentation. If you change the name of this class or the package after creating
25 * this project, you must also update the Main.java file in the project.
26 */
27public class Robot extends TimedRobot {
28
29 private Command m_autonomousCommand;
30
31 private RobotContainer m_robotContainer;
32
33 /**
34 * This function is run when the robot is first started up and should be
35 * used for any initialization code.
36 */
37 public Robot() {
38 // Instantiate our RobotContainer. This will perform all our button bindings, and put our
39 // autonomous chooser on the dashboard.
40 m_robotContainer = RobotContainer.getInstance();
41 HAL.report(tResourceType.kResourceType_Framework, tInstances.kFramework_RobotBuilder);
42 enableLiveWindowInTest(true);
43 }
44
45 /**
46 * This function is called every robot packet, no matter the mode. Use this for items like
47 * diagnostics that you want ran during disabled, autonomous, teleoperated and test.
48 *
49 * <p>This runs after the mode specific periodic functions, but before
50 * LiveWindow and SmartDashboard integrated updating.
51 */
52 @Override
53 public void robotPeriodic() {
54 // Runs the Scheduler. This is responsible for polling buttons, adding newly-scheduled
55 // commands, running already-scheduled commands, removing finished or interrupted commands,
56 // and running subsystem periodic() methods. This must be called from the robot's periodic
57 // block in order for anything in the Command-based framework to work.
58 CommandScheduler.getInstance().run();
59 }
60
61
62 /**
63 * This function is called once each time the robot enters Disabled mode.
64 */
65 @Override
66 public void disabledInit() {
67 }
68
69 @Override
70 public void disabledPeriodic() {
71 }
72
73 /**
74 * This autonomous runs the autonomous command selected by your {@link RobotContainer} class.
75 */
76 @Override
77 public void autonomousInit() {
78 m_autonomousCommand = m_robotContainer.getAutonomousCommand();
79
80 // schedule the autonomous command (example)
81 if (m_autonomousCommand != null) {
82 m_autonomousCommand.schedule();
83 }
84 }
85
86 /**
87 * This function is called periodically during autonomous.
88 */
89 @Override
90 public void autonomousPeriodic() {
91 }
92
93 @Override
94 public void teleopInit() {
95 // This makes sure that the autonomous stops running when
96 // teleop starts running. If you want the autonomous to
97 // continue until interrupted by another command, remove
98 // this line or comment it out.
99 if (m_autonomousCommand != null) {
100 m_autonomousCommand.cancel();
101 }
102 }
103
104 /**
105 * This function is called periodically during operator control.
106 */
107 @Override
108 public void teleopPeriodic() {
109 }
110
111 @Override
112 public void testInit() {
113 // Cancels all running commands at the start of test mode.
114 CommandScheduler.getInstance().cancelAll();
115 }
116
117 /**
118 * This function is called periodically during test mode.
119 */
120 @Override
121 public void testPeriodic() {
122 }
123
124}
11// ROBOTBUILDER TYPE: Robot.
12#pragma once
13
14#include <frc/TimedRobot.h>
15#include <frc2/command/Command.h>
16
17#include "RobotContainer.h"
18
19class Robot : public frc::TimedRobot {
20 public:
21 Robot();
22 void RobotPeriodic() override;
23 void DisabledInit() override;
24 void DisabledPeriodic() override;
25 void AutonomousInit() override;
26 void AutonomousPeriodic() override;
27 void TeleopInit() override;
28 void TeleopPeriodic() override;
29 void TestPeriodic() override;
30
31 private:
32 // Have it null by default so that if testing teleop it
33 // doesn't have undefined behavior and potentially crash.
34 frc2::Command* m_autonomousCommand = nullptr;
35
36 RobotContainer* m_container = RobotContainer::GetInstance();
37};
11// ROBOTBUILDER TYPE: Robot.
12
13#include "Robot.h"
14
15#include <hal/FRCUsageReporting.h>
16
17#include <frc/smartdashboard/SmartDashboard.h>
18#include <frc2/command/CommandScheduler.h>
19
20Robot::Robot() {
21 EnableLiveWindowInTest(true);
22 HAL_Report(HALUsageReporting::kResourceType_Framework,
23 HALUsageReporting::kFramework_RobotBuilder);
24}
25
26/**
27 * This function is called every robot packet, no matter the mode. Use
28 * this for items like diagnostics that you want to run during disabled,
29 * autonomous, teleoperated and test.
30 *
31 * <p> This runs after the mode specific periodic functions, but before
32 * LiveWindow and SmartDashboard integrated updating.
33 */
34void Robot::RobotPeriodic() { frc2::CommandScheduler::GetInstance().Run(); }
35
36/**
37 * This function is called once each time the robot enters Disabled mode. You
38 * can use it to reset any subsystem information you want to clear when the
39 * robot is disabled.
40 */
41void Robot::DisabledInit() {}
42
43void Robot::DisabledPeriodic() {}
44
45/**
46 * This autonomous runs the autonomous command selected by your {@link
47 * RobotContainer} class.
48 */
49void Robot::AutonomousInit() {
50 m_autonomousCommand = m_container->GetAutonomousCommand();
51
52 if (m_autonomousCommand != nullptr) {
53 m_autonomousCommand->Schedule();
54 }
55}
56
57void Robot::AutonomousPeriodic() {}
58
59void Robot::TeleopInit() {
60 // This makes sure that the autonomous stops running when
61 // teleop starts running. If you want the autonomous to
62 // continue until interrupted by another command, remove
63 // this line or comment it out.
64 if (m_autonomousCommand != nullptr) {
65 m_autonomousCommand->Cancel();
66 m_autonomousCommand = nullptr;
67 }
68}
69
70/**
71 * This function is called periodically during operator control.
72 */
73void Robot::TeleopPeriodic() {}
74
75/**
76 * This function is called periodically during test mode.
77 */
78void Robot::TestPeriodic() {}
79
80#ifndef RUNNING_FRC_TESTS
81int main() { return frc::StartRobot<Robot>(); }
82#endif
Bu, RobotBuilder tarafından oluşturulan ana programdır. Bu programın birkaç bölümü vardır (vurgulanan bölümler):
Bu sınıf TimedRobot’u geliştirir. TimedRobot her 20 ms’de bir
autonomousPeriodic()veteleopPeriodic()yöntemlerinizi çağıracaktır.Her 20 ms’de bir çağrılan robotPeriodic yönteminde, bir planlama geçişi yapın.
Sağlanan otonom komut,
autonomousInit()yönteminde otonom başlangıcında planlanır veteleopInit()içindeki otonom dönemin sonunda iptal edilir.
RobotContainer
11// ROBOTBUILDER TYPE: RobotContainer.
12
13package frc.robot;
14
15import frc.robot.commands.*;
16import frc.robot.subsystems.*;
17import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
18import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
19import edu.wpi.first.wpilibj2.command.Command.InterruptionBehavior;
20
21// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=IMPORTS
22import edu.wpi.first.wpilibj2.command.Command;
23import edu.wpi.first.wpilibj2.command.InstantCommand;
24import edu.wpi.first.wpilibj.Joystick;
25import edu.wpi.first.wpilibj2.command.button.JoystickButton;
26import frc.robot.subsystems.*;
27
28 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=IMPORTS
29
30
31/**
32 * This class is where the bulk of the robot should be declared. Since Command-based is a
33 * "declarative" paradigm, very little robot logic should actually be handled in the {@link Robot}
34 * periodic methods (other than the scheduler calls). Instead, the structure of the robot
35 * (including subsystems, commands, and button mappings) should be declared here.
36 */
37public class RobotContainer {
38
39 private static RobotContainer m_robotContainer = new RobotContainer();
40
41 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
42// The robot's subsystems
43 public final Wrist m_wrist = new Wrist();
44 public final Elevator m_elevator = new Elevator();
45 public final Claw m_claw = new Claw();
46 public final DriveTrain m_driveTrain = new DriveTrain();
47
48// Joysticks
49private final Joystick joystick2 = new Joystick(2);
50private final Joystick joystick1 = new Joystick(1);
51private final Joystick logitechController = new Joystick(0);
52
53 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
54
55
56 // A chooser for autonomous commands
57 SendableChooser<Command> m_chooser = new SendableChooser<>();
58
59 /**
60 * The container for the robot. Contains subsystems, OI devices, and commands.
61 */
62 private RobotContainer() {
63 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
64 // Smartdashboard Subsystems
65 SmartDashboard.putData(m_wrist);
66 SmartDashboard.putData(m_elevator);
67 SmartDashboard.putData(m_claw);
68 SmartDashboard.putData(m_driveTrain);
69
70
71 // SmartDashboard Buttons
72 SmartDashboard.putData("Close Claw", new CloseClaw( m_claw ));
73 SmartDashboard.putData("Open Claw: default", new OpenClaw(1));
74 SmartDashboard.putData("Pickup", new Pickup());
75 SmartDashboard.putData("Place", new Place());
76 SmartDashboard.putData("Prepare To Pickup", new PrepareToPickup());
77 SmartDashboard.putData("Set Elevator Setpoint: down", new SetElevatorSetpoint(1, m_elevator));
78 SmartDashboard.putData("Set Elevator Setpoint: up", new SetElevatorSetpoint(2, m_elevator));
79 SmartDashboard.putData("Set Wrist Setpoint: Horizontal", new SetWristSetpoint(0, m_elevator));
80 SmartDashboard.putData("Set Wrist Setpoint: Raise Wrist", new SetWristSetpoint(-45, m_elevator));
81 SmartDashboard.putData("Tank Drive: joystick", new TankDrive(() -> getJoystick1().getY(), () -> getJoystick2().getY(), m_driveTrain));
82 SmartDashboard.putData("DriveAuto: default", new DriveAuto(10, 0));
83
84 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
85 // Configure the button bindings
86 configureButtonBindings();
87
88 // Configure default commands
89 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SUBSYSTEM_DEFAULT_COMMAND
90 m_driveTrain.setDefaultCommand(new TankDrive(() -> getJoystick1().getY(), () -> getJoystick2().getY(), m_driveTrain));
91
92
93 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SUBSYSTEM_DEFAULT_COMMAND
94
95 // Configure autonomous sendable chooser
96 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
97
98 m_chooser.setDefaultOption("Autonomous", new Autonomous());
99
100 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
101
102 SmartDashboard.putData("Auto Mode", m_chooser);
103 }
104
105 public static RobotContainer getInstance() {
106 return m_robotContainer;
107 }
108
109 /**
110 * Use this method to define your button->command mappings. Buttons can be created by
111 * instantiating a {@link GenericHID} or one of its subclasses ({@link
112 * edu.wpi.first.wpilibj.Joystick} or {@link XboxController}), and then passing it to a
113 * {@link edu.wpi.first.wpilibj2.command.button.JoystickButton}.
114 */
115 private void configureButtonBindings() {
116 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
117// Create some buttons
118final JoystickButton r1 = new JoystickButton(logitechController, 12);
119r1.onTrue(new SetWristSetpoint(0, m_elevator).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
120
121final JoystickButton l1 = new JoystickButton(logitechController, 11);
122l1.onTrue(new Place().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
123
124final JoystickButton r2 = new JoystickButton(logitechController, 10);
125r2.onTrue(new Pickup().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
126
127final JoystickButton l2 = new JoystickButton(logitechController, 9);
128l2.onTrue(new PrepareToPickup().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
129
130final JoystickButton dpadLeft = new JoystickButton(logitechController, 8);
131dpadLeft.onTrue(new OpenClaw(0).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
132
133final JoystickButton dpadRight = new JoystickButton(logitechController, 6);
134dpadRight.onTrue(new CloseClaw( m_claw ).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
135
136final JoystickButton dpadDown = new JoystickButton(logitechController, 7);
137dpadDown.onTrue(new SetElevatorSetpoint(2, m_elevator).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
138
139final JoystickButton dpadUp = new JoystickButton(logitechController, 5);
140dpadUp.onTrue(new SetElevatorSetpoint(2, m_elevator).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
141
142
143
144 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
145 }
146
147 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
148public Joystick getLogitechController() {
149 return logitechController;
150 }
151
152public Joystick getJoystick1() {
153 return joystick1;
154 }
155
156public Joystick getJoystick2() {
157 return joystick2;
158 }
159
160
161 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
162
163 /**
164 * Use this to pass the autonomous command to the main {@link Robot} class.
165 *
166 * @return the command to run in autonomous
167 */
168 public Command getAutonomousCommand() {
169 // The selected command will be run in autonomous
170 return m_chooser.getSelected();
171 }
172
173
174}
11// ROBOTBUILDER TYPE: RobotContainer.
12
13#pragma once
14
15// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=INCLUDES
16#include <frc/smartdashboard/SendableChooser.h>
17#include <frc2/command/Command.h>
18
19#include "subsystems/Claw.h"
20#include "subsystems/DriveTrain.h"
21#include "subsystems/Elevator.h"
22#include "subsystems/Wrist.h"
23
24#include "commands/Autonomous.h"
25#include "commands/CloseClaw.h"
26#include "commands/DriveAuto.h"
27#include "commands/OpenClaw.h"
28#include "commands/Pickup.h"
29#include "commands/Place.h"
30#include "commands/PrepareToPickup.h"
31#include "commands/SetElevatorSetpoint.h"
32#include "commands/SetWristSetpoint.h"
33#include "commands/TankDrive.h"
34#include <frc/Joystick.h>
35#include <frc2/command/button/JoystickButton.h>
36
37 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=INCLUDES
38
39class RobotContainer {
40
41public:
42
43 frc2::Command* GetAutonomousCommand();
44 static RobotContainer* GetInstance();
45
46 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=PROTOTYPES
47// The robot's subsystems
48DriveTrain m_driveTrain;
49Claw m_claw;
50Elevator m_elevator;
51Wrist m_wrist;
52
53
54frc::Joystick* getJoystick2();
55frc::Joystick* getJoystick1();
56frc::Joystick* getLogitechController();
57
58 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=PROTOTYPES
59
60private:
61
62 RobotContainer();
63
64 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
65// Joysticks
66frc::Joystick m_logitechController{0};
67frc::Joystick m_joystick1{1};
68frc::Joystick m_joystick2{2};
69
70frc::SendableChooser<frc2::Command*> m_chooser;
71
72 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
73
74 static RobotContainer* m_robotContainer;
75
76 void ConfigureButtonBindings();
77};
11// ROBOTBUILDER TYPE: RobotContainer.
12
13#include "RobotContainer.h"
14#include <frc2/command/ParallelRaceGroup.h>
15#include <frc/smartdashboard/SmartDashboard.h>
16
17
18
19RobotContainer* RobotContainer::m_robotContainer = NULL;
20
21RobotContainer::RobotContainer(){
22 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=CONSTRUCTOR
23
24
25 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=CONSTRUCTOR
26
27 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
28 // Smartdashboard Subsystems
29 frc::SmartDashboard::PutData(&m_driveTrain);
30 frc::SmartDashboard::PutData(&m_claw);
31 frc::SmartDashboard::PutData(&m_elevator);
32 frc::SmartDashboard::PutData(&m_wrist);
33
34
35 // SmartDashboard Buttons
36 frc::SmartDashboard::PutData("DriveAuto: default", new DriveAuto(10, 0));
37 frc::SmartDashboard::PutData("Tank Drive: joystick", new TankDrive([this] {return getJoystick1()->GetY();}, [this] {return getJoystick2()->GetY();}, &m_driveTrain));
38 frc::SmartDashboard::PutData("Set Wrist Setpoint: Horizontal", new SetWristSetpoint(0, &m_elevator));
39 frc::SmartDashboard::PutData("Set Wrist Setpoint: Raise Wrist", new SetWristSetpoint(-45, &m_elevator));
40 frc::SmartDashboard::PutData("Set Elevator Setpoint: down", new SetElevatorSetpoint(1, &m_elevator));
41 frc::SmartDashboard::PutData("Set Elevator Setpoint: up", new SetElevatorSetpoint(2, &m_elevator));
42 frc::SmartDashboard::PutData("Prepare To Pickup", new PrepareToPickup());
43 frc::SmartDashboard::PutData("Place", new Place());
44 frc::SmartDashboard::PutData("Pickup", new Pickup());
45 frc::SmartDashboard::PutData("Open Claw: default", new OpenClaw(1_s));
46 frc::SmartDashboard::PutData("Close Claw", new CloseClaw( &m_claw ));
47
48 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
49
50 ConfigureButtonBindings();
51
52 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DEFAULT-COMMANDS
53m_driveTrain.SetDefaultCommand(TankDrive([this] {return getJoystick1()->GetY();}, [this] {return getJoystick2()->GetY();}, &m_driveTrain));
54
55 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DEFAULT-COMMANDS
56
57 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
58
59 m_chooser.SetDefaultOption("Autonomous", new Autonomous());
60
61 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
62
63 frc::SmartDashboard::PutData("Auto Mode", &m_chooser);
64
65}
66
67RobotContainer* RobotContainer::GetInstance() {
68 if (m_robotContainer == NULL) {
69 m_robotContainer = new RobotContainer();
70 }
71 return(m_robotContainer);
72}
73
74void RobotContainer::ConfigureButtonBindings() {
75 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
76
77frc2::JoystickButton m_dpadUp{&m_logitechController, 5};
78frc2::JoystickButton m_dpadDown{&m_logitechController, 7};
79frc2::JoystickButton m_dpadRight{&m_logitechController, 6};
80frc2::JoystickButton m_dpadLeft{&m_logitechController, 8};
81frc2::JoystickButton m_l2{&m_logitechController, 9};
82frc2::JoystickButton m_r2{&m_logitechController, 10};
83frc2::JoystickButton m_l1{&m_logitechController, 11};
84frc2::JoystickButton m_r1{&m_logitechController, 12};
85
86m_dpadUp.OnTrue(SetElevatorSetpoint(2, &m_elevator).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
87
88m_dpadDown.OnTrue(SetElevatorSetpoint(2, &m_elevator).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
89
90m_dpadRight.OnTrue(CloseClaw( &m_claw ).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
91
92m_dpadLeft.OnTrue(OpenClaw(0_s).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
93
94m_l2.OnTrue(PrepareToPickup().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
95
96m_r2.OnTrue(Pickup().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
97
98m_l1.OnTrue(Place().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
99
100m_r1.OnTrue(SetWristSetpoint(0, &m_elevator).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
101
102
103 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
104}
105
106// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
107
108frc::Joystick* RobotContainer::getLogitechController() {
109 return &m_logitechController;
110}
111frc::Joystick* RobotContainer::getJoystick1() {
112 return &m_joystick1;
113}
114frc::Joystick* RobotContainer::getJoystick2() {
115 return &m_joystick2;
116}
117
118 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
119
120
121frc2::Command* RobotContainer::GetAutonomousCommand() {
122 // The selected command will be run in autonomous
123 return m_chooser.GetSelected();
124}
Bu, alt sistemlerin ve operatör arayüzünün tanımlandığı RobotBuilder tarafından oluşturulan RobotContainer’dır. Bu programın birkaç bölümü vardır (vurgulanan bölümler):
Alt sistemlerin her biri burada açıklanmıştır. Bunları gerektiren herhangi bir komuta parametre olarak geçirilebilirler.
RobotBuilder robot özelliklerinde sağlanan otonom bir komut varsa, bu, kontrol panelinde seçilmek üzere Gönderilebilir Seçici’ye eklenir.
Tüm operatör arayüzü bileşenlerinin kodu burada oluşturulur.
Ek olarak, OI düğmelerini çalıştırılması gereken komutlara bağlayan kod da burada oluşturulur.
Commands to be run on a subsystem when no other commands are running are defined here.
Bir gösterge panosu aracılığıyla çalıştırılacak komutlar burada tanımlanır.