Solução preventiva de problemas do robô
Nota
Na FIRST® Robotics Competition, os robôs sofrem múltiplos esforços enquanto manobram pelo campo. É importante certificar-se de que as conexões sejam firmes, as partes estejam aparafusadas seguramente em seu lugar e que tudo está montado para que o robô não quebre enquanto saltita pelo campo.
Verifique as conexões da bateria

A fita que deveria cobrir a conexão da bateria nesses exemplos foi removida para ilustrar o que está acontecendo. Em seus robôs, as conexões devem estar cobertas.
Chacoalhe o conector do cabo da bateria. Frequentemente eles se soltam porque os parafusos se afrouxaram ou, às vezes, a crimpagem não foi completamente fechada. Você só encontrará os realmente ruins assim, porque muitas vezes a fita isolante reforça a conexão a um ponto em que parece rígida. Usar um voltímetro ou Battery Beak ajudará nisso.
Aplique uma força considerável no cabo da bateria a 90 graus para tentar mover a direção do cabo deixando a bateria, se bem-sucedido, a conexão não estava firme o suficiente de começo e deve ser refeita. Este article tem informações mais detalhadas sobre a bateria.
Fixando a Bateria no Robô
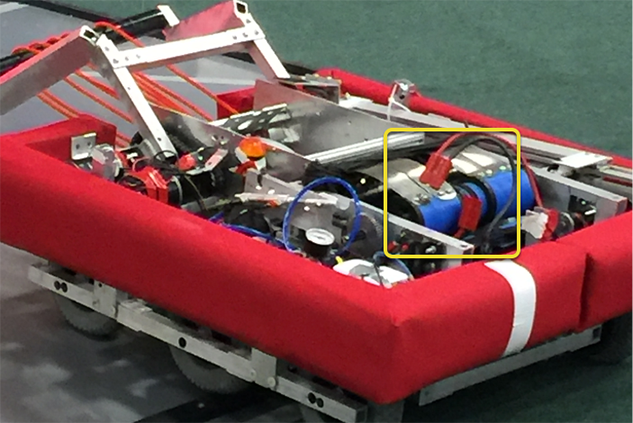
In almost every event we see at least one robot where a not properly secured battery connector (the large Anderson) comes apart and disconnects power from the robot. This has happened in championship matches on the Einstein and everywhere else. Its an easy to ensure that this doesn’t happen to you by securing the two connectors by wrapping a tie wrap around the connection. 10 or 12 tie wraps for the peace of mind during an event is not a high price to pay to guarantee that you will not have the problem of this robot from an actual event after a bumpy ride over a defense. Also, secure your battery to the chassis with hook and loop tape or another method, especially in games with rough defense, obstacles, or climbing.
Fixando o conector da bateria e os cabos de alimentação principais
Um conector de bateria solto da parte do robô (o Anderson SB grande) pode permitir que os cabos de alimentação principais sejam puxados quando a bateria for substituída. Se os cabos de alimentação principais estiverem soltos, esse «puxão» pode chegar até os terminais crimpados no disjuntor de 120 A ou no Power Distribuition Panel (PDP), entortar o terminal e, com o tempo, fazer com que a extremidade do terminal se quebre de fadiga. Colocar algumas abraçadeiras plásticas prendendo os cabos de alimentação principais ao chassi e aparafusando o conector da bateria do lado do robô pode evitar isso, além de facilitar a conexão da bateria.
Disjuntor principal (disjuntor de 120 A)
Nota
Certifique-se de que as porcas estejam apertadas firmemente e o disjuntor esteja preso a um elemento rígido.
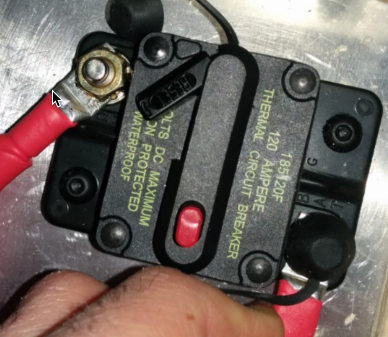

Aplique uma forte força de torção para tentar girar o terminal crimpado. Se o terminal girar, a porca não está apertada o suficiente. Depois de apertar a porca, teste novamente tentando girar o terminal.
A porca original tem um recurso de travamento em estrela, que pode se desgastar com o tempo: pode ser necessário verificar de vez em quando após partidas, especialmente se o conector da bateria do lado do robô não estiver conectado ao chassi.
A porca é normalmente uma rosca 1/4-28 relativamente incomum: certifique-se de que isso esteja correto se a porca for substituída.
Como o pino de metal é apenas moldado na carcaça, de vez em quando você pode quebrar o pino. Não se espante, apenas substitua o conjunto.
Quando sujeito a várias temporadas de competição, o disjuntor principal é suscetível a danos por fadiga por vibração e uso e pode começar a abrir sob impacto. Cada vez que a função de fusível térmico é acionada, pode se tornar progressivamente mais fácil de desarmar. Muitas equipes veteranas começam cada temporada com um disjuntor principal novo e carregam sobressalentes.
Power Distribution Panel (PDP)
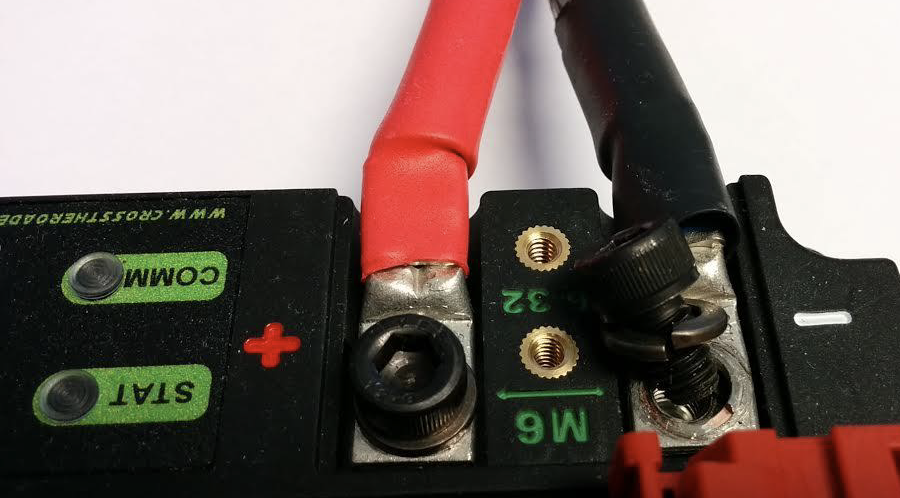
Certifique-se de que arruelas de pressão foram colocadas sob os parafusos PDP, mas não é fácil de confirmar visualmente e às vezes você não consegue. Você pode verificar removendo a carcaça. Além disso, se você apertar os fios vermelho e preto juntos, às vezes você pode pegar as conexões realmente soltas.
Teste de Puxão


Os conectores Weidmuller para alimentação, saída do compressor, conector de alimentação do roboRIO e alimentação do rádio são importantes de verificar puxando as conexões conforme mostrado. Certifique-se de que nenhuma das conexões seja desconectada.
Procure por curtos possíveis ou iminentes nos conectores Weidmuller próximos um dos outros e com comprimentos de fio desencapados muito longos (fios descascados extra longos).
Os conectores de espadilha também podem falhar devido a crimpagens inadequadas, portanto, teste-os também.
Fusíveis de lâmina
Certifique-se de colocar o fusível de 20A (amarelo) à esquerda e o fusível de 10A (vermelho) à direita.


Aviso
Tome cuidado para garantir que os fusíveis estejam totalmente encaixados nos porta-fusíveis. Os fusíveis devem descer tanto quanto na figura abaixo (fusíveis de marcas diferentes têm conexões de comprimentos diferentes). Deve ser quase impossível remover o fusível manualmente (sem o uso de um alicate). Se isso não for feito corretamente, o robô/rádio pode apresentar problemas de conectividade intermitentes.
Se você puder remover os fusíveis da lâmina manualmente, eles não estão completamente encaixados. Certifique-se de que eles estejam completamente encaixados no PDP para que não se soltem durante a operação do robô.
roboRIO e limalha
As limalhas são cavacos finos ou fragmentos de pedra, metal ou outro material produzido por uma operação de usinagem. Frequentemente, modificações devem ser feitas em um robô enquanto as peças do sistema de controle estão em seu lugar. A placa de circuito do roboRIO tem revestimento isolante, mas isso não garante absolutamente que os cavacos de metal não causem curto-circuito em trilhas ou componentes dentro da carcaça. Neste caso, você deve ter cuidado para garantir que nenhum dos cavacos vá para o roboRIO ou qualquer um dos outros componentes. Em particular, os cabeçotes de 3 pinos expostos são um lugar onde os cavacos podem entrar na carcaça. Uma rápida varredura em cada um dos quatro lados com uma lanterna geralmente é suficiente para encontrar as áreas realmente propícias a infiltração.
Cabo Ethernet
Se o cabo Ethernet do roboRIO para o rádio não tiver o clipe que trava o conector, pegue outro cabo. Este é um problema comum que acontecerá várias vezes em todas as competições. Certifique-se de que seus cabos estejam bem presos. O clipe frequentemente quebra, especialmente quando puxado por um caminho estreito, ele se agarra em algo e quebra.
Cabos Soltos
Cables must be tightened down, particularly the radio power and ethernet cable.
O cabo Ethernet também é bem pesado, se puder balançar livremente, o clipe de plástico pode não ser suficiente para segurar os conectores Ethernet conectados.
Reproduzindo Problemas no Pit
Além da agitação normal dos cabos enquanto o robô está ligado e conectado, é sugerido que um lado do robô seja levantado e solto. Dirigir em campo, especialmente contra os defensores, costuma ser muito violento e isso ajuda a garantir que nada caia. É melhor que o robô falhe nos Pits do que no meio de uma partida.
Ao fazer este teste, é importante estar conectado por Ethernet e não por USB, caso contrário, você não está testando todos os caminhos críticos.
Verifique o Firmware e Versões
Os inspetores de Robô fazem isso, mas você também deve fazer isso, pois ajuda os inspetores e eles apreciam isso. E garante que você está executando o código mais recente corrigido de bugs. Você não gostaria de perder uma partida por causa de um software do sistema de controle desatualizado em seu robô.
Verificações da Estação do Piloto
Frequentemente vemos problemas com a Estação do Piloto. Você deve:
SEMPRE traga o cabo de alimentação do laptop para o campo, não importa o quão boa seja a bateria, você pode ligá-lo na tomada no campo.
Verifique as configurações de energia e suspensão, desligue a suspensão e hibernação, protetores de tela, etc.
Desligue o gerenciamento de energia para dispositivos USB (gerenciador de desenvolvimento)
Desligue o gerenciamento de energia para portas Ethernet (gerenciador de desenvolvimento)
Desligue o Windows Defender
Desligue o firewall
Feche todos os aplicativos, exceto DS/Dashboard quando estiver em campo.
Verifique se não há nada desnecessário em execução na bandeja do sistema no menu iniciar (canto inferior direito)
Ferramentas Úteis

Parece nunca haver luz suficiente dentro dos robôs, pelo menos não o suficiente para examinar os pontos críticos de conexão, então considere o uso de uma lanterna LED portátil para inspecionar as conexões em seu robô. Elas estão disponíveis em qualquer loja de ferragens/automotiva.
Uma ferramenta WAGO é uma boa ferramenta para refazer conexões Weidmuller com fios trançados. Frequentemente, farei uma para mostrar à equipe e, em seguida, farei o resto usando a ferramenta WAGO para pressionar o êmbolo branco enquanto inserem o fio trançado. O ângulo da ferramenta WAGO torna isso particularmente útil.