Setpoint Command¶
Important
RobotBuilder has been updated to support the new commandbased framework! Unfortunately, this documentation is outdated and only for the old commandbased framework. Individuals interested in updating this documentation can open a pull request on the frc-docs repository.
A common use case in robot programs is to drive an actuator to a particular angle or position that is measured using a potentiometer or encoder. This happens so often that there is a shortcut in RobotBuilder to do this task. It is called the Setpoint command and it’s one of the choices on the palette or the right-click context menu that can be inserted under “Commands”.
Start with a PIDSubsystem¶
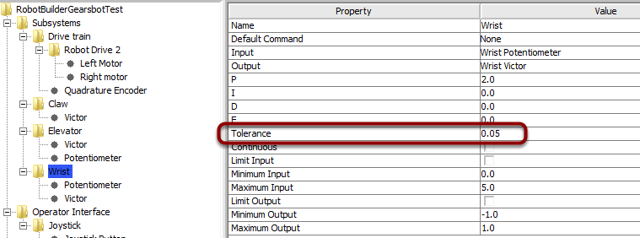
Suppose in a robot there is a wrist joint with a potentiometer that measures the angle. First create a PIDSubsystem that include the motor that moves the wrist joint and the potentiometer that measures the angle. The PIDSubsystem should have all the PID constants filled in and working properly.
It is important to set the Tolerance parameter. This controls how far off the current value can be from the setpoint and be considered on target. This is the criteria that the SetpointCommand uses to move onto the next command.
Creating the Setpoint Command¶
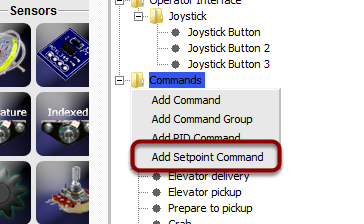
Right-click on the Commands folder in the palette and select “Add Setpoint command”.
Setpoint Command Parameters¶
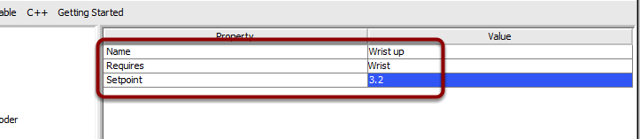
Fill in the name of the new command. The Requires field is the PIDSubsystem that is being driven to a setpoint and the Setpoint parameter is the setpoint value for the PIDSubsystem. There is no need to fill in any code for this command, it is automatically created by RobotBuilder.
Whenever this command is scheduled, it will automatically drive the subsystem to the specified setpoint. When the setpoint is reached within the tolerance specified in the PIDSubsystem, the command ends and the next command starts. It is important to specify a tolerance in the PIDSubsystem or this command might never end because the tolerance is not achieved.
Note
For more information about PID Control, please see the Advanced Controls Introduction.