Simulation Specific User Interface Elements¶
WPILib has extended robot simulation to introduce a graphical user interface (GUI) component. This allows teams to easily visualize their robot’s inputs and outputs.
Note
The Simulation GUI is very similar in many ways to Glass. Some of the following pages will link to Glass sections that describe elements common to both GUIs.
Running the GUI¶
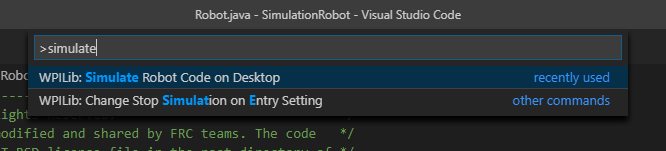
You can simply launch the GUI via the Run Simulation command palette option.

And the halsim_gui.dll option should popup in a new dialog (halsim.gui.so on Linux and halsim_gui.dylib on macOS). Select this and press Ok. This will now launch the Simulation GUI!
Using the GUI¶
Learning the Layout¶
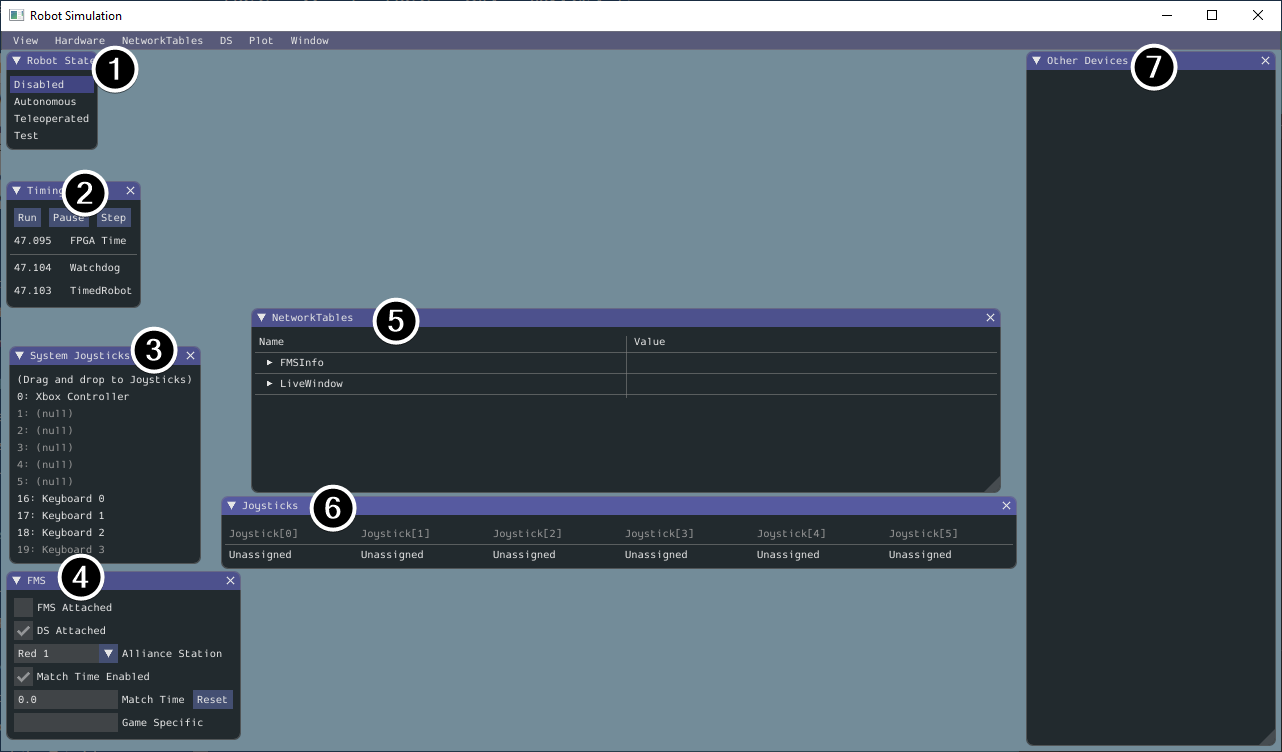
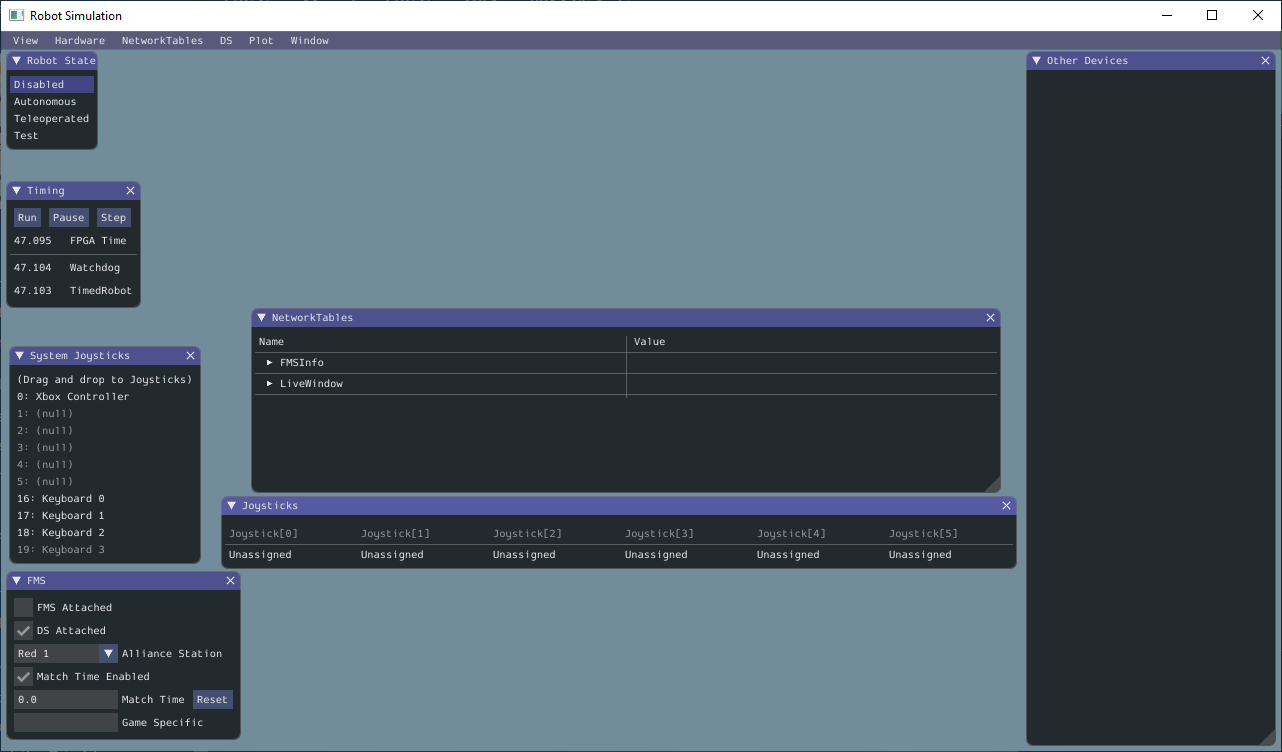
The following items are shown on the simulation GUI by default:
Robot State - This is the robot’s current state or “mode”. You can click on the labels to change mode as you would on the normal Driver Station.
Timing - Shows the values of the Robot’s timers and allows the timing to be manipulated.
System Joysticks - This is a list of joysticks connected to your system currently.
FMS - This is used for simulating many of the common FMS systems.
NetworkTables - This shows the data that has been published to NetworkTables.
Joysticks - This is joysticks that the robot code can directly pull from.
Other Devices - This includes devices that do not fall into any of the other categories, such as the ADXRS450 gyro that is included in the Kit of Parts or third party devices that support simulation.
The following items can be added from the Hardware menu, but are not shown by default.
Addressable LEDs - This shows LEDs controlled by the
AddressableLEDClass.Analog Inputs - This includes any devices that would normally use the ANALOG IN connector on the roboRIO, such as any Analog based gyros.
DIO - (Digital Input Output) This includes any devices that use the DIO connector on the roboRIO.
Encoders - This will show any instantiated devices that extend or use the
Encoderclass.PDPs - This shows the Power Distribution Panel object.
PWM Outputs - This is a list of instantiated PWM devices. This will appear as many devices as you instantiate in robot code, as well as their outputs.
Relays - This includes any relay devices. This includes VEX Spike relays.
Solenoids - This is a list of “connected” solenoids. When you create a solenoid object and push outputs, these are shown here.
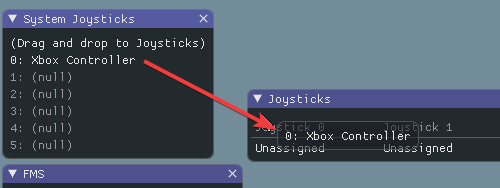
Adding a System Joystick to Joysticks¶
To add a joystick from the list of system joysticks, simply click and drag a shown joystick under the “System Joysticks” menu to the “Joysticks” menu”.
Note
The FRC® Driver Station does special mapping to gamepads connected and the WPILib simulator does not “map” these by default. You can turn on this behavior by pressing the “Map gamepad” toggle underneath the “Joysticks” menu.
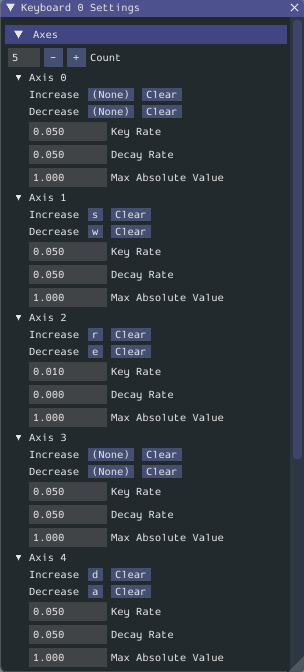
Using the Keyboard as a Joystick¶
You add a keyboard to the list of system joysticks by clicking and dragging one of the keyboard items (e.g. Keyboard 0) just like a joystick above. To edit the settings of the keyboard go to the DS item in the menu bar then choose Keyboard 0 Settings. This allows you to control which keyboard buttons control which axis. This is a common example of how to make the keyboard similar to a split sticks arcade drive on an Xbox controller (uses axis 1 & 4):
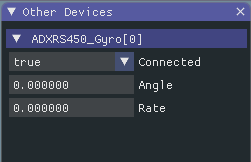
Modifying ADXRS450 Inputs¶
Using the ADXRS450 object is a fantastic way to test gyro based outputs. This will show up in the “Other Devices” menu. A drop down menu is then exposed that shows various options such as “Connected”, “Angle”, and “Rate”. All of these values are values that you can change, and that your robot code and use on-the-fly.
Determining Simulation from Robot Code¶
In cases where vendor libraries do not compile when running the robot simulation, you can wrap their content with RobotBase.isReal() which returns a boolean.
TalonSRX motorLeft;
TalonSRX motorRight;
public Robot() {
if (RobotBase.isReal()) {
motorLeft = new TalonSRX(0);
motorRight = new TalonSRX(1);
}
}
Note
Reassigning value types in C++ requires move or copy assignment; vendors classes that both do not support the SIM and lack a move or copy assignment operator cannot be worked around with conditional allocation unless a pointer is used, instead of a value type.
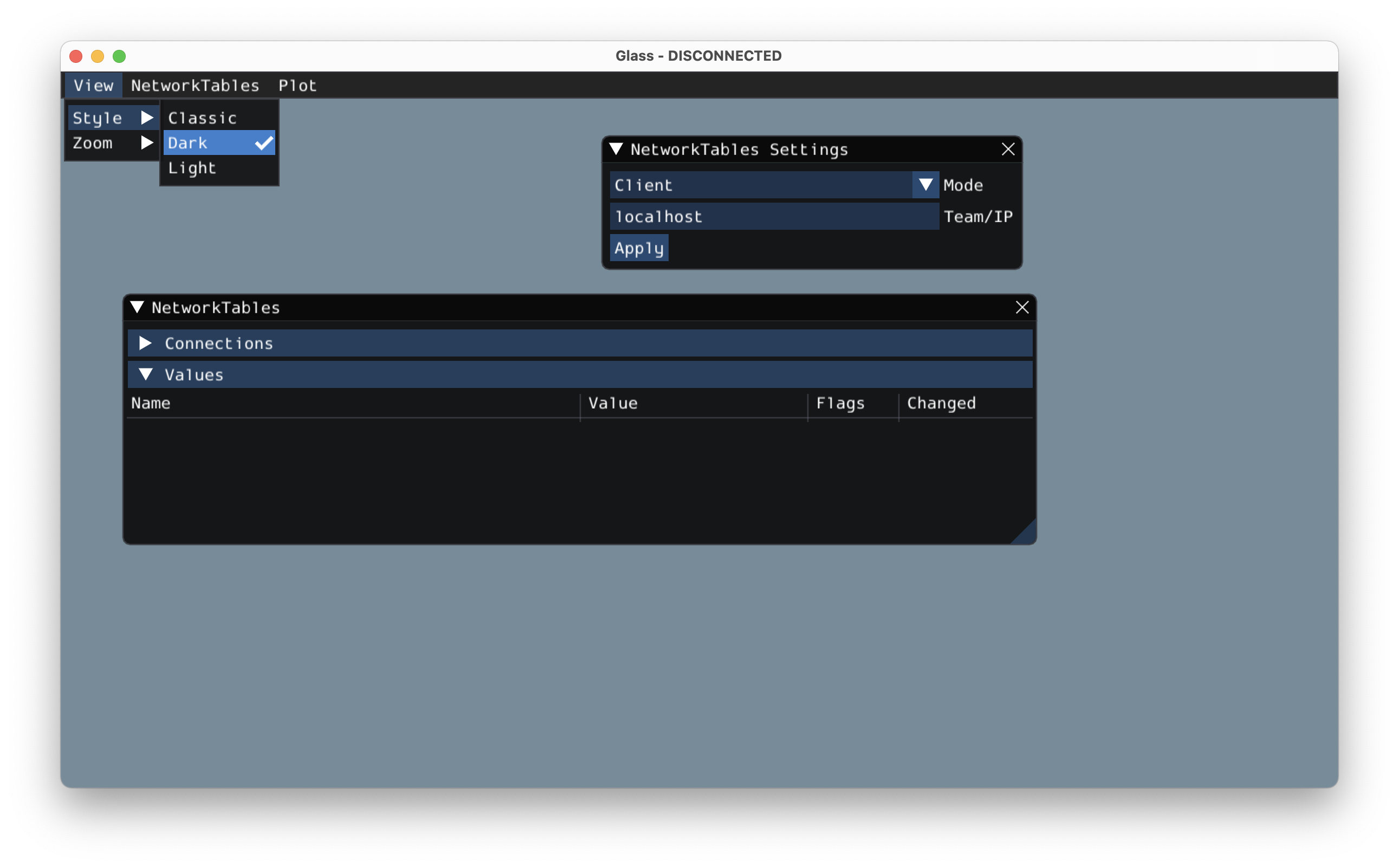
Changing View Settings¶
The View menu item contains Zoom and Style settings that can be customized. The Zoom option dictates the size of the text in the application whereas the Style option allows you to select between the Classic, Light, and Dark modes.
An example of the Dark style setting is below:
Note
In Simulation GUI v2021.2.1 and below, the default zoom setting of 100% may cause text to appear too big on certain macOS Retina displays. Please reduce the zoom level to 75% or 50% or upgrade to v2021.2.2 or later to mitigate this issue.
Clearing Application Data¶
Application data for the Simulation GUI, including widget sizes and positions as well as other custom information for widgets is stored in a imgui.ini file. This file is stored in the root of the project directory that the simulation is run from.
The imgui.ini configuration file can simply be deleted to restore the Simulation GUI to a “clean slate”.