Encoders - Software¶
Note
This section covers encoders in software. For a hardware guide to encoders, see Encoders - Hardware.
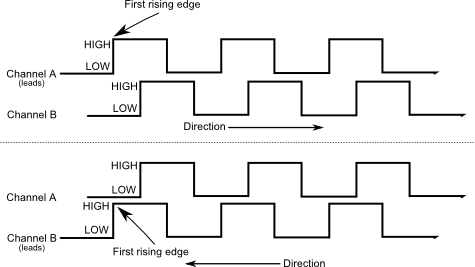
Encoders are devices used to measure motion (usually, the rotation of a shaft). The encoders used in FRC are known as “quadrature encoders.” These encoders produce square-wave signals on two channels that are a quarter-period out-of-phase (hence the term, “quadrature”). The pulses are used to measure the rotation, and the direction of motion can be determined from which channel “leads” the other.
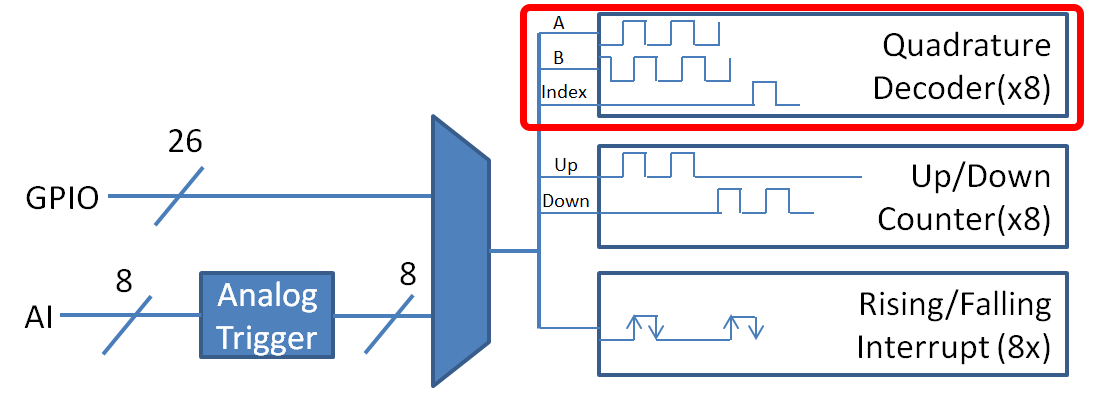
The FPGA handles encoders either through a counter module or an encoder module, depending on the decoding type - the choice is handled automatically by WPILib. The FPGA contains 8 encoder modules.
The Encoder class¶
WPILib provides support for encoders through the Encoder class (Java, C++). This class provides a simple API for configuring and reading data from encoders.
Initializing an encoder¶
An encoder can be instantiated as follows:
// Initializes an encoder on DIO pins 0 and 1
// Defaults to 4X decoding and non-inverted
Encoder encoder = new Encoder(0, 1);
// Initializes an encoder on DIO pins 0 and 1
// Defaults to 4X decoding and non-inverted
frc::Encoder encoder{0, 1};
Decoding type¶
The WPILib Encoder class can decode encoder signals in three different modes:
1X Decoding: Increments the distance for every complete period of the encoder signal (once per four edges).
2X Decoding: Increments the distance for every half-period of the encoder signal (once per two edges).
4X Decoding: Increments the distance for every edge of the encoder signal (four times per period).
4X decoding offers the greatest precision, but at the potential cost of increased “jitter” in rate measurements. To use a different decoding type, use the following constructor:
// Initializes an encoder on DIO pins 0 and 1
// 2X encoding and non-inverted
Encoder encoder = new Encoder(0, 1, false, Encoder.EncodingType.k2X);
// Initializes an encoder on DIO pins 0 and 1
// 2X encoding and non-inverted
frc::Encoder encoder{0, 1, false, frc::Encoder::EncodingType::k2X};
Configuring encoder parameters¶
Note
The Encoder class does not make any assumptions about units of distance; it will return values in whatever units were used to calculate the distance-per-pulse value. Users thus have complete control over the distance units used. However, units of time are always in seconds.
Note
The number of pulses used in the distance-per-pulse calculation does not depend on the decoding type - each “pulse” should always be considered to be a full cycle (four edges).
The Encoder class offers a number of configuration methods:
// Configures the encoder to return a distance of 4 for every 256 pulses
// Also changes the units of getRate
encoder.setDistancePerPulse(4./256.);
// Configures the encoder to consider itself stopped after .1 seconds
encoder.setMaxPeriod(.1);
// Configures the encoder to consider itself stopped when its rate is below 10
encoder.setMinRate(10);
// Reverses the direction of the encoder
encoder.setReverseDirection(true);
// Configures an encoder to average its period measurement over 5 samples
// Can be between 1 and 127 samples
encoder.setSamplesToAverage(5);
// Configures the encoder to return a distance of 4 for every 256 pulses
// Also changes the units of getRate
encoder.SetDistancePerPulse(4./256.);
// Configures the encoder to consider itself stopped after .1 seconds
encoder.SetMaxPeriod(.1);
// Configures the encoder to consider itself stopped when its rate is below 10
encoder.SetMinRate(10);
// Reverses the direction of the encoder
encoder.SetReverseDirection(true);
// Configures an encoder to average its period measurement over 5 samples
// Can be between 1 and 127 samples
encoder.SetSamplesToAverage(5);
Reading information from encoders¶
The Encoder class provides a wealth of information to the user about the motion of the encoder.
Distance¶
Note
Quadrature encoders measure relative distance, not absolute; the distance value returned will depend on the position of the encoder when the robot was turned on or the encoder value was last reset.
Users can obtain the total distance traveled by the encoder with the getDistance() method:
// Configures an encoder to return a distance of 4 for every 256 pulses
encoder.setDistancePerPulse(4./256.);
// Configures an encoder to return a distance of 4 for every 256 pulses
encoder.SetDistancePerPulse(4./256.);
Rate¶
Note
Units of time for the Encoder class are always in seconds.
Users can obtain the current rate of change of the encoder with the getRate() method:
// Gets the current rate of the encoder
encoder.getRate();
// Gets the current rate of the encoder
encoder.GetRate();
Stopped¶
Users can obtain whether the encoder is stationary with the getStopped() method:
// Gets whether the encoder is stopped
encoder.getStopped();
// Gets whether the encoder is stopped
encoder.GetStopped();
Direction¶
Users can obtain the direction in which the encoder last moved with the getDirection() method:
// Gets the last direction in which the encoder moved
encoder.getDirection();
// Gets the last direction in which the encoder moved
encoder.GetDirection();
Period¶
Users can obtain the period of the encoder pulses (in seconds) with the getPeriod() method:
// Gets the current period of the encoder
encoder.getPeriod();
// Gets the current period of the encoder
encoder.GetPeriod();
Resetting an encoder¶
To reset an encoder to a distance reading of zero, call the reset() method. This is useful for ensuring that the measured distance corresponds to the actual desired physical measurement, and is often called during a homing routine:
// Resets the encoder to read a distance of zero
encoder.reset();
// Resets the encoder to read a distance of zero
encoder.Reset();
Using encoders in code¶
Encoders are some of the most useful sensors in FRC; they are very nearly a requirement to make a robot capable of nontrivially-automated actuations and movement. The potential applications of encoders in robot code are too numerous to summarize fully here, but a few basic examples are provided below:
Driving to a distance¶
Encoders can be used on a robot drive to create a simple “drive to distance” routine. This is very useful for robot autonomy:
// Creates an encoder on DIO ports 0 and 1
Encoder encoder = new Encoder(0, 1);
// Initialize motor controllers and drive
Spark left1 new Spark(0);
Spark left2 = new Spark(1);
Spark right1 = new Spark(2);
Spark right2 = new Spark(3);
SpeedControllerGroup leftMotors = new SpeedControllerGroup(left1, left2);
SpeedControllerGroup rightMotors = new SpeedControllerGroup(right1, right2);
DifferentialDrive drive = new DifferentialDrive(leftMotors, rightMotors);
@Override
public void robotInit() {
// Configures the encoder's distance-per-pulse
// The robot moves forward 1 foot per encoder rotation
// There are 256 pulses per encoder rotation
encoder.setDistancePerPulse(1./256.);
}
@Override
public void autonomousPeriodic() {
// Drives forward at half speed until the robot has moved 5 feet, then stops:
if(encoder.getDistance < 5) {
drive.tankDrive(.5, .5);
} else {
drive.tankDrive(0, 0);
}
}
// Creates an encoder on DIO ports 0 and 1.
frc::Encoder encoder{0, 1};
// Initialize motor controllers and drive
frc::Spark left1{0};
frc::Spark left2{1};
frc::Spark right1{2};
frc::Spark right2{3};
frc::SpeedControllerGroup leftMotors{left1, left2};
frc::SpeedControllerGroup rightMotors{right1, right2};
frc::DifferentialDrive drive{leftMotors, rightMotors};
void Robot::RobotInit() {
// Configures the encoder's distance-per-pulse
// The robot moves forward 1 foot per encoder rotation
// There are 256 pulses per encoder rotation
encoder.SetDistancePerPulse(1./256.);
}
void Robot:AutonomousPeriodic() {
// Drives forward at half speed until the robot has moved 5 feet, then stops:
if(encoder.GetDistance < 5) {
drive.TankDrive(.5, .5);
} else {
drive.TankDrive(0, 0);
}
}
Stabilizing heading¶
Warning
Like with all control loops, users should be careful to ensure that the sensor direction and the turning direction are consistent. If they are not, the loop will be unstable and the robot will turn wildly.
Encoders can be used to ensure that a robot drives straight in a manner quite similar to how it is done with a gyroscope. A simple implementation with a P loop is given below:
// The encoders for the drive
Encoder leftEncoder = new Encoder(0,1);
Encoder rightEncoder = new Encoder(2,3);
// The gain for a simple P loop
double kP = 1;
// Initialize motor controllers and drive
Spark left1 = new Spark(0);
Spark left2 = new Spark(1);
Spark right1 = new Spark(2);
Spark right2 = new Spark(3);
SpeedControllerGroup leftMotors = new SpeedControllerGroup(left1, left2);
SpeedControllerGroup rightMotors = new SpeedControllerGroup(right1, right2);
DifferentialDrive drive = new DifferentialDrive(leftMotors, rightMotors);
@Override
public void autonomousInit() {
// Configures the encoders' distance-per-pulse
// The robot moves forward 1 foot per encoder rotation
// There are 256 pulses per encoder rotation
leftEncoder.setDistancePerPulse(1./256.);
rightEncoder.setDistancePerPulse(1./256.);
}
@Override
public void autonomousPeriodic() {
// Assuming no wheel slip, the difference in encoder distances is proportional to the heading error
double error = leftEncoder.getDistance() - rightEncoder.getDistance();
// Drives forward continuously at half speed, using the encoders to stabilize the heading
drive.tankDrive(.5 + kP * error, .5 - kP * error);
}
// The encoders for the drive
frc::Encoder leftEncoder{0,1};
frc::Encoder rightEncoder{2,3};
// The gain for a simple P loop
double kP = 1;
// Initialize motor controllers and drive
frc::Spark left1{0};
frc::Spark left2{1};
frc::Spark right1{2};
frc::Spark right2{3};
frc::SpeedControllerGroup leftMotors{left1, left2};
frc::SpeedControllerGroup rightMotors{right1, right2};
frc::DifferentialDrive drive{leftMotors, rightMotors};
void Robot::AutonomousInit() {
// Configures the encoders' distance-per-pulse
// The robot moves forward 1 foot per encoder rotation
// There are 256 pulses per encoder rotation
leftEncoder.SetDistancePerPulse(1./256.);
rightEncoder.SetDistancePerPulse(1./256.);
}
void Robot::AutonomousPeriodic() {
// Assuming no wheel slip, the difference in encoder distances is proportional to the heading error
double error = leftEncoder.GetDistance() - rightEncoder.GetDistance();
// Drives forward continuously at half speed, using the encoders to stabilize the heading
drive.TankDrive(.5 + kP * error, .5 - kP * error);
}
More-advanced implementations can use more-complicated control loops. Closing a control loop on the encoder difference is roughly analogous to closing it on the heading error, and so PD loops are particularly effective.
PID Control¶
Encoders are particularly useful as inputs to PID controllers (the heading stabilization example above is a simple P loop).
Homing an encodered mechanism¶
Since encoders measure relative distance, it is often important to ensure that their “zero-point” is in the right place. A typical way to do this is a “homing routine,” in which a mechanism is moved until it hits a known position (usually accomplished with a limit switch), or “home,” and then the encoder is reset. The following code provides a basic example:
Encoder encoder = new Encoder(0, 1);
Spark spark = new Spark(0);
// Limit switch on DIO 2
DigitalInput limit = new DigitalInput(2);
public void autonomousPeriodic() {
// Runs the motor backwards at half speed until the limit switch is pressed
// then turn off the motor and reset the encoder
if(!limit.get()) {
spark.set(-.5);
} else {
spark.set(0);
encoder.reset();
}
}
frc::Encoder encoder{0,1};
frc::Spark spark{0};
// Limit switch on DIO 2
frc::DigitalInput limit{2};
void AutonomousPeriodic() {
// Runs the motor backwards at half speed until the limit switch is pressed
// then turn off the motor and reset the encoder
if(!limit.Get()) {
spark.Set(-.5);
} else {
spark.Set(0);
encoder.Reset();
}
}