Using the WPILib Classes to Drive your Robot¶
WPILib includes many classes to help make your robot get driving faster.
Standard drivetrains¶
Differential Drive Robots¶
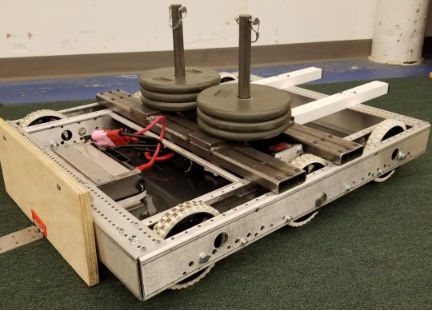
These drive bases typically have two or more in-line traction or omni wheels per side (e.g., 6WD or 8WD) and may also be known as “skid-steer”, “tank drive”, or “West Coast Drive”. The Kit of Parts drivetrain is an example of a differential drive. These drivetrains are capable of driving forward/backward and can turn by driving the two sides in opposite directions causing the wheels to skid sideways. These drivetrains are not capable of sideways translational movement.
Mecanum Drive¶
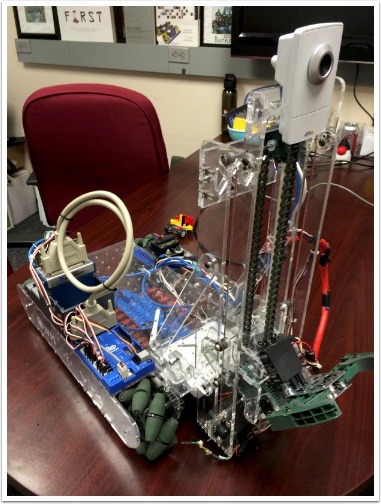
Mecanum drive is a method of driving using specially designed wheels that allow the robot to drive in any direction without changing the orientation of the robot. A robot with a conventional drivetrain (all wheels pointing in the same direction) must turn in the direction it needs to drive. A mecanum robot can move in any direction without first turning and is called a holonomic drive. The wheels (shown on this robot) have rollers that cause the forces from driving to be applied at a 45 degree angle rather than straight forward as in the case of a conventional drive.
When viewed from the top, the rollers on a mecanum drivetrain should form an ‘X’ pattern. This results in the force vectors (when driving the wheel forward) on the front two wheels pointing forward and inward and the rear two wheels pointing forward and outward. By spinning the wheels in different directions, various components of the force vectors cancel out, resulting in the desired robot movement. A quick chart of different movements has been provided below, drawing out the force vectors for each of these motions may help in understanding how these drivetrains work. By varying the speeds of the wheels in addition to the direction, movements can be combined resulting in translation in any direction and rotation, simultaneously.
Drive Class Conventions¶
Note
This article describes conventions and defaults used by the WPILib Drive classes (DifferentialDrive, MecanumDrive, and KilloughDrive). For further details on using these classes, see the subsequent articles.
Motor Inversion¶
By default, the class inverts the motor outputs for the right side of the drivetrain. Generally this will mean that no inversion needs to be done on the individual SpeedController objects. To disable this behavior, use the setRightSideInverted() method.
Squaring Inputs & Input Deadband¶
When driving robots, it is often desirable to manipulate the joystick inputs such that the robot has finer control at low speeds while still using the full output range. One way to accomplish this is by squaring the joystick input, then reapplying the sign. By default the Differential Drive class will square the inputs. If this is not desired (e.g. if passing values in from a PIDController), use one of the drive methods with the squaredInputs parameter and set it to false.
By default, the Differential Drive class applies an input deadband of .02. This means that input values with a magnitude below .02 (after any squaring as described above) will be set to 0. In most cases these small inputs result from imperfect joystick centering and are not sufficient to cause drivetrain movement, the deadband helps reduce unnecessary motor heating that may result from applying these small values to the drivetrain. To change the deadband, use the setDeadband() method.
Motor Safety¶
Motor Safety is a mechanism in WPILib that takes the concept of a watchdog and breaks it out into one watchdog (Motor Safety timer) for each individual actuator. Note that this protection mechanism is in addition to the System Watchdog which is controlled by the Network Communications code and the FPGA and will disable all actuator outputs if it does not receive a valid data packet for 125ms.
The purpose of the Motor Safety mechanism is the same as the purpose of a watchdog timer, to disable mechanisms which may cause harm to themselves, people or property if the code locks up and does not properly update the actuator output. Motor Safety breaks this concept out on a per actuator basis so that you can appropriately determine where it is necessary and where it is not. Examples of mechanisms that should have motor safety enabled are systems like drive trains and arms. If these systems get latched on a particular value they could cause damage to their environment or themselves. An example of a mechanism that may not need motor safety is a spinning flywheel for a shooter. If this mechanism gets latched on a particular value it will simply continue spinning until the robot is disabled. By default Motor Safety is enabled for RobotDrive objects and disabled for all other speed controllers and servos.
The Motor Safety feature operates by maintaining a timer that tracks how long it has been since the feed() method has been called for that actuator. Code in the Driver Station class initiates a comparison of these timers to the timeout values for any actuator with safety enabled every 5 received packets (100ms nominal). The set() methods of each speed controller class and the set() and setAngle() methods of the servo class call feed() to indicate that the output of the actuator has been updated.
The Motor Safety interface of speed controllers can be interacted with by the user using the following methods:
exampleJaguar.setSafetyEnabled(true);
exampleJaguar.setSafetyEnabled(false);
exampleJaguar.setExpiration(.1);
exampleJaguar.feed()
exampleJaguar->SetSafetyEnabled(true);
exampleJaguar->SetSafetyEnabled(false);
exampleJaguar->SetExpiration(.1);
exampleJaguar->Feed();
By default all RobotDrive objects enable Motor Safety. Depending on the mechanism and the structure of your program, you may wish to configure the timeout length of the motor safety (in seconds). The timeout length is configured on a per actuator basis and is not a global setting. The default (and minimum useful) value is 100ms.
Axis Conventions¶
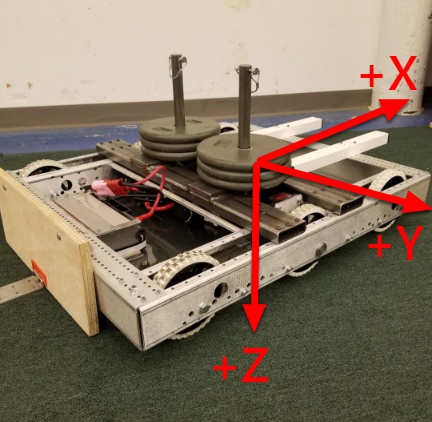
This library uses the NED axes convention (North-East-Down as external reference in the world frame). The positive X axis points ahead, the positive Y axis points right, and the positive Z axis points down. Rotations follow the right-hand rule, so clockwise rotation around the Z axis is positive.
Warning
This convention is different than the convention for joysticks which typically have -Y as Up (commonly mapped to throttle) and +X as Right. Pay close attention to the examples below if you want help with typical Joystick->Drive mapping.
Using the DifferentialDrive class to control Differential Drive (WCD) robots¶
Note
WPILib provides separate Robot Drive classes for the most common drive train configurations (differential, mecanum, and Killough). The DifferentialDrive class handles the differential drivetrain configuration. These drive bases typically have two or more in-line traction or omni wheels per side (e.g., 6WD or 8WD) and may also be known as “skid-steer”, “tank drive”, or “West Coast Drive”. The Kit of Parts drivetrain is an example of a differential drive. There are methods to control the drive with 3 different styles (“Tank”, “Arcade”, or “Curvature”), explained in the article below.
DifferentialDrive is a method provided for the control of “skid-steer” or “West Coast” drivetrains, such as the Kit of Parts chassis. Instantiating a DifferentialDrive is as simple as so:
public class Robot {
Spark m_left = new Spark(1);
Spark m_right = new Spark(2);
DifferentialDrive m_drive = new DifferentialDrive(m_left, m_right);
public void robotInit() {
m_left.setInverted(true); // if you want to invert motor outputs, you must do so here
}
class Robot {
private:
frc::Spark m_left{1};
frc::Spark m_right{2};
frc::DifferentialDrive m_drive{m_left, m_right};
void Robot::RobotInit() {
m_left.SetInverted(true); // if you want to invert motor outputs, you must do so here
}
Multi-Motor DifferentialDrive with SpeedControllerGroups¶
Many FRC drivetrains have more than 1 motor on each side. In order to use these with DifferentialDrive, the motors on each side have to be collected into a single SpeedController, using the SpeedControllerGroup class. The examples below show a 4 motor (2 per side) drivetrain. To extend to more motors, simply create the additional controllers and pass them all into the SpeedController group constructor (it takes an arbitrary number of inputs).
public class Robot {
Spark m_frontLeft = new Spark(1);
Spark m_rearLeft = new Spark(2);
SpeedControllerGroup m_left = new SpeedControllerGroup(m_frontLeft, m_rearLeft);
Spark m_frontRight = new Spark(3);
Spark m_rearRight = new Spark(4);
SpeedControllerGroup m_right = new SpeedControllerGroup(m_frontRight, m_rearRight);
DifferentialDrive m_drive = new DifferentialDrive(m_left, m_right);
public void robotInit() {
m_left.setInverted(true); // if you want to invert the entire side you can do so here
}
class Robot {
public:
frc::Spark m_frontLeft{1};
frc::Spark m_rearLeft{2};
frc::SpeedControllerGroup m_left{m_frontLeft, m_rearLeft};
frc::Spark m_frontRight{3};
frc::Spark m_rearRight{4};
frc::SpeedControllerGroup m_right{m_frontRight, m_rearRight};
frc::DifferentialDrive m_drive{m_left, m_right};
void Robot::RobotInit() {
m_left.SetInverted(true); // if you want to invert the entire side you can do so here
}
Drive Modes¶
Note
The DifferentialDrive class contains three different default modes of driving your robot’s motors.
Tank Drive, which controls the left and right side independently
Arcade Drive, which controls a forward and turn speed
Curvature Drive, a subset of Arcade Drive, which makes your robot handle like a car with constant-curvature turns.
As stated above, the DifferentialDrive class contains three default methods for controlling skid-steer or WCD robots. Note that you can create your own methods of controlling the robot’s driving and have them call tankDrive() with the derived inputs for left and right motors.
The Tank Drive mode is used to control each side of the drivetrain independently (usually with an individual joystick axis controlling each). This example shows how to use the Y-axis of two separate joysticks to run the drivetrain in Tank mode. Construction of the objects has been omitted, for above for drivetrain construction and here for Joystick construction.
The Arcade Drive mode is used to control the drivetrain using speed/throttle and rotation rate. This is typically used either with two axes from a single joystick, or split across joysticks (often on a single gamepad) with the throttle coming from one stick and the rotation from another. This example shows how to use a single joystick with the Arcade mode. Construction of the objects has been omitted, for above for drivetrain construction and here for Joystick construction.
Like Arcade Drive, the Curvature Drive mode is used to control the drivetrain using speed/throttle and rotation rate. The difference is that the rotation control is attempting to control radius of curvature instead of rate of heading change. This mode also has a quick-turn parameter that is used to engage a sub-mode that allows for turning in place. This example shows how to use a single joystick with the Curvature mode. Construction of the objects has been omitted, for above for drivetrain construction and here for Joystick construction.
public void teleopPeriodic() {
myDrive.tankDrive(leftStick.getY(), rightStick.getY());
myDrive.arcadeDrive(driveStick.getY(),driveStick.getX());
myDrive.curvatureDrive(driveStick.getY(), driveStick.getX(), driveStick.GetButton(1));
}
void TeleopPeriodic() override {
myDrive.TankDrive(leftStick.GetY(), rightStick.GetY());
myDrive.ArcadeDrive(driveStick.GetY(), driveStick.GetX());
myDrive.CurvatureDrive(driveStick.GetY(), driveStick.GetX(), driveStick.GetButton(1));
}