RobotBuilder创建的代码
RobotBuilder生成的项目的布局
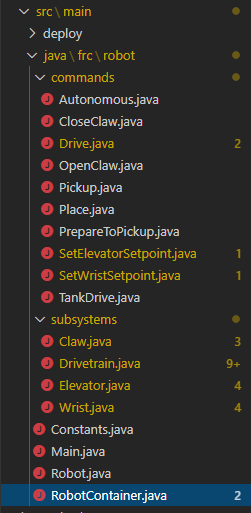
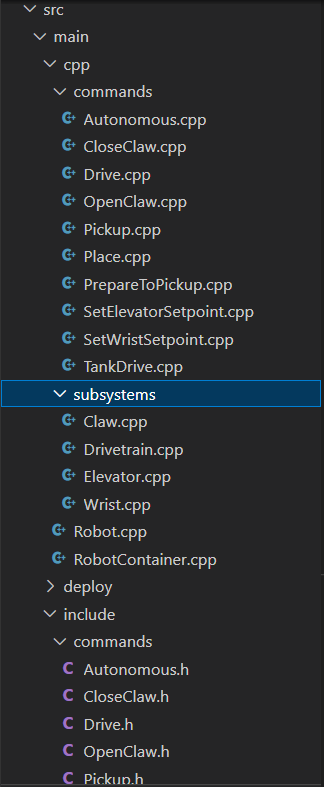
RobotBuilder 生成的项目由用于命令的包(Java)或文件夹(C++)和子系统的另一个包组成。每个指令或子系统对象都存储在这些容器下。在项目的顶层,您将找到机器人主程序 (RobotContainer.java/C++)。
有关基于指令的机器人组织的更多信息,请参阅:doc:/docs/software/commandbased/structuring-command-based-project
自动生成代码
// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
m_chooser.setDefaultOption("Autonomous", new Autonomous());
// END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
SmartDashboard.putData("Auto Mode", m_chooser);
// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
m_chooser.SetDefaultOption("Autonomous", new Autonomous());
// END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
frc::SmartDashboard::PutData("Auto Mode", &m_chooser);
当修改机器人描述并重新导出代码时,RobotBuilder被设计成不能修改您对文件所做的任何更改的形式,从而保留您的代码。这使得RobotBuilder成为一个全生命周期的工具。为了知道哪些代码可以被RobotBuilder修改,它生成的部分可能要重写,并使用一些特殊注释分隔。上面的例子显示了这些注释。不要在这些注释块中添加任何代码,下次从RobotBuilder导出项目时,它将被重写。
如果必须修改其中一个版块中的代码,则可以删除注释,但这将阻止以后进一步的更新。在上面的示例中,如果删除了//BEGIN和//END注释,那么稍后在RobotBuilder中会添加另一个所需的子系统,它将不会在下一个导出中生成。
// ROBOTBUILDER TYPE: Robot.
// ROBOTBUILDER TYPE: Robot.
Additionally, each file has a comment defining the type of file. If this is modified or deleted, RobotBuilder will completely regenerate the file deleting any code added both inside and outside the AUTOGENERATED CODE blocks.
主要的机器人程序
11// ROBOTBUILDER TYPE: Robot.
12
13package frc.robot;
14
15import edu.wpi.first.hal.FRCNetComm.tInstances;
16import edu.wpi.first.hal.FRCNetComm.tResourceType;
17import edu.wpi.first.hal.HAL;
18import edu.wpi.first.wpilibj.TimedRobot;
19import edu.wpi.first.wpilibj2.command.Command;
20import edu.wpi.first.wpilibj2.command.CommandScheduler;
21
22/**
23 * The VM is configured to automatically run this class, and to call the
24 * functions corresponding to each mode, as described in the TimedRobot
25 * documentation. If you change the name of this class or the package after
26 * creating this project, you must also update the build.properties file in
27 * the project.
28 */
29public class Robot extends TimedRobot { // (1)
30
31 private Command m_autonomousCommand;
32
33 private RobotContainer m_robotContainer;
34
35 /**
36 * This function is run when the robot is first started up and should be
37 * used for any initialization code.
38 */
39 @Override
40 public void robotInit() {
41 // Instantiate our RobotContainer. This will perform all our button bindings, and put our
42 // autonomous chooser on the dashboard.
43 m_robotContainer = RobotContainer.getInstance();
44 HAL.report(tResourceType.kResourceType_Framework, tInstances.kFramework_RobotBuilder);
45 }
46
47 /**
48 * This function is called every robot packet, no matter the mode. Use this for items like
49 * diagnostics that you want ran during disabled, autonomous, teleoperated and test.
50 *
51 * <p>This runs after the mode specific periodic functions, but before
52 * LiveWindow and SmartDashboard integrated updating.
53 */
54 @Override
55 public void robotPeriodic() {
56 // Runs the Scheduler. This is responsible for polling buttons, adding newly-scheduled
57 // commands, running already-scheduled commands, removing finished or interrupted commands,
58 // and running subsystem periodic() methods. This must be called from the robot's periodic
59 // block in order for anything in the Command-based framework to work.
60 CommandScheduler.getInstance().run(); // (2)
61 }
62
63
64 /**
65 * This function is called once each time the robot enters Disabled mode.
66 */
67 @Override
68 public void disabledInit() {
69 }
70
71 @Override
72 public void disabledPeriodic() {
73 }
74
75 /**
76 * This autonomous runs the autonomous command selected by your {@link RobotContainer} class.
77 */
78 @Override
79 public void autonomousInit() {
80 m_autonomousCommand = m_robotContainer.getAutonomousCommand(); // (3)
81
82 // schedule the autonomous command (example)
83 if (m_autonomousCommand != null) {
84 m_autonomousCommand.schedule();
85 }
86 }
87
88 /**
89 * This function is called periodically during autonomous.
90 */
91 @Override
92 public void autonomousPeriodic() {
93 }
94
95 @Override
96 public void teleopInit() {
97 // This makes sure that the autonomous stops running when
98 // teleop starts running. If you want the autonomous to
99 // continue until interrupted by another command, remove
100 // this line or comment it out.
101 if (m_autonomousCommand != null) {
102 m_autonomousCommand.cancel();
103 }
104 }
105
106 /**
107 * This function is called periodically during operator control.
108 */
109 @Override
110 public void teleopPeriodic() {
111 }
112
113 @Override
114 public void testInit() {
115 // Cancels all running commands at the start of test mode.
116 CommandScheduler.getInstance().cancelAll();
117 }
118
119 /**
120 * This function is called periodically during test mode.
121 */
122 @Override
123 public void testPeriodic() {
124 }
125
126}
11// ROBOTBUILDER TYPE: Robot.
12#pragma once
13
14#include <frc/TimedRobot.h>
15#include <frc2/command/Command.h>
16
17#include "RobotContainer.h"
18
19class Robot : public frc::TimedRobot { // {1}
20 public:
21 void RobotInit() override;
22 void RobotPeriodic() override;
23 void DisabledInit() override;
24 void DisabledPeriodic() override;
25 void AutonomousInit() override;
26 void AutonomousPeriodic() override;
27 void TeleopInit() override;
28 void TeleopPeriodic() override;
29 void TestPeriodic() override;
30
31 private:
32 // Have it null by default so that if testing teleop it
33 // doesn't have undefined behavior and potentially crash.
34 frc2::Command* m_autonomousCommand = nullptr;
35
36 RobotContainer* m_container = RobotContainer::GetInstance();
37};
11// ROBOTBUILDER TYPE: Robot.
12
13#include "Robot.h"
14
15#include <frc/smartdashboard/SmartDashboard.h>
16#include <frc2/command/CommandScheduler.h>
17
18void Robot::RobotInit() {}
19
20/**
21 * This function is called every robot packet, no matter the mode. Use
22 * this for items like diagnostics that you want to run during disabled,
23 * autonomous, teleoperated and test.
24 *
25 * <p> This runs after the mode specific periodic functions, but before
26 * LiveWindow and SmartDashboard integrated updating.
27 */
28void Robot::RobotPeriodic() { frc2::CommandScheduler::GetInstance().Run(); } // (2)
29
30/**
31 * This function is called once each time the robot enters Disabled mode. You
32 * can use it to reset any subsystem information you want to clear when the
33 * robot is disabled.
34 */
35void Robot::DisabledInit() {}
36
37void Robot::DisabledPeriodic() {}
38
39/**
40 * This autonomous runs the autonomous command selected by your {@link
41 * RobotContainer} class.
42 */
43void Robot::AutonomousInit() {
44 m_autonomousCommand = m_container->GetAutonomousCommand(); // {3}
45
46 if (m_autonomousCommand != nullptr) {
47 m_autonomousCommand->Schedule();
48 }
49}
50
51void Robot::AutonomousPeriodic() {}
52
53void Robot::TeleopInit() {
54 // This makes sure that the autonomous stops running when
55 // teleop starts running. If you want the autonomous to
56 // continue until interrupted by another command, remove
57 // this line or comment it out.
58 if (m_autonomousCommand != nullptr) {
59 m_autonomousCommand->Cancel();
60 m_autonomousCommand = nullptr;
61 }
62}
63
64/**
65 * This function is called periodically during operator control.
66 */
67void Robot::TeleopPeriodic() {}
68
69/**
70 * This function is called periodically during test mode.
71 */
72void Robot::TestPeriodic() {}
73
74#ifndef RUNNING_FRC_TESTS
75int main() { return frc::StartRobot<Robot>(); }
76#endif
这是RobotBuilder生成的主程序。这个计划有几个部分(突出显示的部分):
这个类扩展了timerobot。TimeRobot会每20毫秒调用你的’ ‘ autonomouPeriodic() ‘ ‘和’ teleopPeriodic() ‘ ‘的方法。
在每 20ms 调用一次的 robotsPeriodic 方法中,进行一次调度传递。
提供的自动阶段指令在
autonomousInit()方法中被安排在自动阶段开始时,并在自动阶段结束时在``teleopInit()`` 中取消。
RobotContainer
11// ROBOTBUILDER TYPE: RobotContainer.
12
13package frc.robot;
14
15import frc.robot.commands.*;
16import frc.robot.subsystems.*;
17import edu.wpi.first.wpilibj.smartdashboard.SendableChooser;
18import edu.wpi.first.wpilibj.smartdashboard.SmartDashboard;
19import edu.wpi.first.wpilibj2.command.Command.InterruptionBehavior;
20
21// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=IMPORTS
22import edu.wpi.first.wpilibj2.command.Command;
23import edu.wpi.first.wpilibj2.command.InstantCommand;
24import edu.wpi.first.wpilibj.Joystick;
25import edu.wpi.first.wpilibj2.command.button.JoystickButton;
26import frc.robot.subsystems.*;
27
28 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=IMPORTS
29
30
31/**
32 * This class is where the bulk of the robot should be declared. Since Command-based is a
33 * "declarative" paradigm, very little robot logic should actually be handled in the {@link Robot}
34 * periodic methods (other than the scheduler calls). Instead, the structure of the robot
35 * (including subsystems, commands, and button mappings) should be declared here.
36 */
37public class RobotContainer {
38
39 private static RobotContainer m_robotContainer = new RobotContainer();
40
41 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
42// The robot's subsystems
43 public final Wrist m_wrist = new Wrist(); // (1)
44 public final Elevator m_elevator = new Elevator();
45 public final Claw m_claw = new Claw();
46 public final Drivetrain m_drivetrain = new Drivetrain();
47
48// Joysticks
49private final Joystick joystick2 = new Joystick(2); // (3)
50private final Joystick joystick1 = new Joystick(1);
51private final Joystick logitechController = new Joystick(0);
52
53 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
54
55
56 // A chooser for autonomous commands
57 SendableChooser<Command> m_chooser = new SendableChooser<>();
58
59 /**
60 * The container for the robot. Contains subsystems, OI devices, and commands.
61 */
62 private RobotContainer() {
63 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
64 // Smartdashboard Subsystems
65 SmartDashboard.putData(m_wrist); // (6)
66 SmartDashboard.putData(m_elevator);
67 SmartDashboard.putData(m_claw);
68 SmartDashboard.putData(m_drivetrain);
69
70
71 // SmartDashboard Buttons
72 SmartDashboard.putData("Close Claw", new CloseClaw( m_claw )); // (6)
73 SmartDashboard.putData("Open Claw: OpenTime", new OpenClaw(1.0, m_claw));
74 SmartDashboard.putData("Pickup", new Pickup());
75 SmartDashboard.putData("Place", new Place());
76 SmartDashboard.putData("Prepare To Pickup", new PrepareToPickup());
77 SmartDashboard.putData("Set Elevator Setpoint: Bottom", new SetElevatorSetpoint(0, m_elevator));
78 SmartDashboard.putData("Set Elevator Setpoint: Platform", new SetElevatorSetpoint(0.2, m_elevator));
79 SmartDashboard.putData("Set Elevator Setpoint: Top", new SetElevatorSetpoint(0.3, m_elevator));
80 SmartDashboard.putData("Set Wrist Setpoint: Horizontal", new SetWristSetpoint(0, m_wrist));
81 SmartDashboard.putData("Set Wrist Setpoint: Raise Wrist", new SetWristSetpoint(-45, m_wrist));
82 SmartDashboard.putData("Drive: Straight3Meters", new Drive(3, 0, m_drivetrain));
83 SmartDashboard.putData("Drive: Place", new Drive(Drivetrain.PlaceDistance, Drivetrain.BackAwayDistance, m_drivetrain));
84
85 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
86 // Configure the button bindings
87 configureButtonBindings();
88
89 // Configure default commands
90 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SUBSYSTEM_DEFAULT_COMMAND
91 m_drivetrain.setDefaultCommand(new TankDrive(() -> getJoystick1().getY(), () -> getJoystick2().getY(), m_drivetrain)); // (5)
92
93
94 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SUBSYSTEM_DEFAULT_COMMAND
95
96 // Configure autonomous sendable chooser
97 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
98
99 m_chooser.addOption("Set Elevator Setpoint: Bottom", new SetElevatorSetpoint(0, m_elevator));
100 m_chooser.addOption("Set Elevator Setpoint: Platform", new SetElevatorSetpoint(0.2, m_elevator));
101 m_chooser.addOption("Set Elevator Setpoint: Top", new SetElevatorSetpoint(0.3, m_elevator));
102 m_chooser.setDefaultOption("Autonomous", new Autonomous()); // (2)
103
104 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
105
106 SmartDashboard.putData("Auto Mode", m_chooser);
107 }
108
109 public static RobotContainer getInstance() {
110 return m_robotContainer;
111 }
112
113 /**
114 * Use this method to define your button->command mappings. Buttons can be created by
115 * instantiating a {@link GenericHID} or one of its subclasses ({@link
116 * edu.wpi.first.wpilibj.Joystick} or {@link XboxController}), and then passing it to a
117 * {@link edu.wpi.first.wpilibj2.command.button.JoystickButton}.
118 */
119 private void configureButtonBindings() {
120 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
121// Create some buttons
122final JoystickButton r1 = new JoystickButton(logitechController, 12); // (4)
123r1.onTrue(new Autonomous().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
124
125final JoystickButton l1 = new JoystickButton(logitechController, 11);
126l1.onTrue(new Place().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
127
128final JoystickButton r2 = new JoystickButton(logitechController, 10);
129r2.onTrue(new Pickup().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
130
131final JoystickButton l2 = new JoystickButton(logitechController, 9);
132l2.onTrue(new PrepareToPickup().withInterruptBehavior(InterruptionBehavior.kCancelSelf));
133
134final JoystickButton dpadLeft = new JoystickButton(logitechController, 8);
135dpadLeft.onTrue(new OpenClaw(1.0, m_claw).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
136
137final JoystickButton dpadRight = new JoystickButton(logitechController, 6);
138dpadRight.onTrue(new CloseClaw( m_claw ).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
139
140final JoystickButton dpadDown = new JoystickButton(logitechController, 7);
141dpadDown.onTrue(new SetElevatorSetpoint(0, m_elevator).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
142
143final JoystickButton dpadUp = new JoystickButton(logitechController, 5);
144dpadUp.onTrue(new SetElevatorSetpoint(0.3, m_elevator).withInterruptBehavior(InterruptionBehavior.kCancelSelf));
145
146
147
148 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
149 }
150
151 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
152public Joystick getLogitechController() {
153 return logitechController;
154 }
155
156public Joystick getJoystick1() {
157 return joystick1;
158 }
159
160public Joystick getJoystick2() {
161 return joystick2;
162 }
163
164
165 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
166
167 /**
168 * Use this to pass the autonomous command to the main {@link Robot} class.
169 *
170 * @return the command to run in autonomous
171 */
172 public Command getAutonomousCommand() {
173 // The selected command will be run in autonomous
174 return m_chooser.getSelected();
175 }
176
177
178}
11// ROBOTBUILDER TYPE: RobotContainer.
12
13#pragma once
14
15// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=INCLUDES
16#include <frc/smartdashboard/SendableChooser.h>
17#include <frc2/command/Command.h>
18
19#include "subsystems/Claw.h"
20#include "subsystems/Drivetrain.h"
21#include "subsystems/Elevator.h"
22#include "subsystems/Wrist.h"
23
24#include "commands/Autonomous.h"
25#include "commands/CloseClaw.h"
26#include "commands/Drive.h"
27#include "commands/OpenClaw.h"
28#include "commands/Pickup.h"
29#include "commands/Place.h"
30#include "commands/PrepareToPickup.h"
31#include "commands/SetElevatorSetpoint.h"
32#include "commands/SetWristSetpoint.h"
33#include "commands/TankDrive.h"
34#include <frc/Joystick.h>
35#include <frc2/command/button/JoystickButton.h>
36
37 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=INCLUDES
38
39class RobotContainer {
40
41public:
42
43 frc2::Command* GetAutonomousCommand();
44 static RobotContainer* GetInstance();
45
46 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=PROTOTYPES
47// The robot's subsystems
48Drivetrain m_drivetrain; // (1)
49Claw m_claw;
50Elevator m_elevator;
51Wrist m_wrist;
52
53
54frc::Joystick* getJoystick2();
55frc::Joystick* getJoystick1();
56frc::Joystick* getLogitechController();
57
58 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=PROTOTYPES
59
60private:
61
62 RobotContainer();
63
64 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
65// Joysticks
66frc::Joystick m_logitechController{0}; // (3)
67frc::Joystick m_joystick1{1};
68frc::Joystick m_joystick2{2};
69
70frc::SendableChooser<frc2::Command*> m_chooser;
71
72 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DECLARATIONS
73
74Autonomous m_autonomousCommand;
75 static RobotContainer* m_robotContainer;
76
77 void ConfigureButtonBindings();
78};
11// ROBOTBUILDER TYPE: RobotContainer.
12
13#include "RobotContainer.h"
14#include <frc2/command/ParallelRaceGroup.h>
15#include <frc/smartdashboard/SmartDashboard.h>
16
17
18
19RobotContainer* RobotContainer::m_robotContainer = NULL;
20
21RobotContainer::RobotContainer() : m_autonomousCommand(
22 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=CONSTRUCTOR
23){
24
25
26
27 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=CONSTRUCTOR
28
29 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
30 // Smartdashboard Subsystems
31 frc::SmartDashboard::PutData(&m_drivetrain);
32 frc::SmartDashboard::PutData(&m_claw);
33 frc::SmartDashboard::PutData(&m_elevator);
34 frc::SmartDashboard::PutData(&m_wrist);
35
36
37 // SmartDashboard Buttons
38 frc::SmartDashboard::PutData("Drive: Straight3Meters", new Drive(3, 0, &m_drivetrain)); // (6)
39 frc::SmartDashboard::PutData("Drive: Place", new Drive(Drivetrain::PlaceDistance, Drivetrain::BackAwayDistance, &m_drivetrain));
40 frc::SmartDashboard::PutData("Set Wrist Setpoint: Horizontal", new SetWristSetpoint(0, &m_wrist));
41 frc::SmartDashboard::PutData("Set Wrist Setpoint: Raise Wrist", new SetWristSetpoint(-45, &m_wrist));
42 frc::SmartDashboard::PutData("Set Elevator Setpoint: Bottom", new SetElevatorSetpoint(0, &m_elevator));
43 frc::SmartDashboard::PutData("Set Elevator Setpoint: Platform", new SetElevatorSetpoint(0.2, &m_elevator));
44 frc::SmartDashboard::PutData("Set Elevator Setpoint: Top", new SetElevatorSetpoint(0.3, &m_elevator));
45 frc::SmartDashboard::PutData("Prepare To Pickup", new PrepareToPickup());
46 frc::SmartDashboard::PutData("Place", new Place());
47 frc::SmartDashboard::PutData("Pickup", new Pickup());
48 frc::SmartDashboard::PutData("Open Claw: OpenTime", new OpenClaw(1.0_s, &m_claw));
49 frc::SmartDashboard::PutData("Close Claw", new CloseClaw( &m_claw ));
50
51 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=SMARTDASHBOARD
52
53 ConfigureButtonBindings();
54
55 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DEFAULT-COMMANDS
56m_drivetrain.SetDefaultCommand(TankDrive([this] {return getJoystick1()->GetY();}, [this] {return getJoystick2()->GetY();}, &m_drivetrain)); // (5)
57
58 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=DEFAULT-COMMANDS
59
60 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
61
62 m_chooser.AddOption("Set Elevator Setpoint: Bottom", new SetElevatorSetpoint(0, &m_elevator));
63 m_chooser.AddOption("Set Elevator Setpoint: Platform", new SetElevatorSetpoint(0.2, &m_elevator));
64 m_chooser.AddOption("Set Elevator Setpoint: Top", new SetElevatorSetpoint(0.3, &m_elevator));
65
66 m_chooser.SetDefaultOption("Autonomous", new Autonomous()); // (2)
67
68 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=AUTONOMOUS
69
70 frc::SmartDashboard::PutData("Auto Mode", &m_chooser);
71
72}
73
74RobotContainer* RobotContainer::GetInstance() {
75 if (m_robotContainer == NULL) {
76 m_robotContainer = new RobotContainer();
77 }
78 return(m_robotContainer);
79}
80
81void RobotContainer::ConfigureButtonBindings() {
82 // BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
83
84frc2::JoystickButton m_dpadUp{&m_logitechController, 5}; // (4)
85frc2::JoystickButton m_dpadDown{&m_logitechController, 7};
86frc2::JoystickButton m_dpadRight{&m_logitechController, 6};
87frc2::JoystickButton m_dpadLeft{&m_logitechController, 8};
88frc2::JoystickButton m_l2{&m_logitechController, 9};
89frc2::JoystickButton m_r2{&m_logitechController, 10};
90frc2::JoystickButton m_l1{&m_logitechController, 11};
91frc2::JoystickButton m_r1{&m_logitechController, 12};
92
93m_dpadUp.OnTrue(SetElevatorSetpoint(0.3, &m_elevator).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
94
95m_dpadDown.OnTrue(SetElevatorSetpoint(0, &m_elevator).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
96
97m_dpadRight.OnTrue(CloseClaw( &m_claw ).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
98
99m_dpadLeft.OnTrue(OpenClaw(1.0_s, &m_claw).WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
100
101m_l2.OnTrue(PrepareToPickup().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
102
103m_r2.OnTrue(Pickup().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
104
105m_l1.OnTrue(Place().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
106
107m_r1.OnTrue(Autonomous().WithInterruptBehavior(frc2::Command::InterruptionBehavior::kCancelSelf));
108
109
110 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=BUTTONS
111}
112
113// BEGIN AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
114
115frc::Joystick* RobotContainer::getLogitechController() {
116 return &m_logitechController;
117}
118frc::Joystick* RobotContainer::getJoystick1() {
119 return &m_joystick1;
120}
121frc::Joystick* RobotContainer::getJoystick2() {
122 return &m_joystick2;
123}
124
125 // END AUTOGENERATED CODE, SOURCE=ROBOTBUILDER ID=FUNCTIONS
126
127
128frc2::Command* RobotContainer::GetAutonomousCommand() {
129 // The selected command will be run in autonomous
130 return m_chooser.GetSelected();
131}
这是由 RobotBuilder 生成的 RobotContainer,它是定义子系统和操作员界面的地方。该计划有许多部分(高亮的部分):
每个子系统都在此处声明。它们可以作为参数传递给任何需要它们的命令。
如果 RobotBuilder 机器人属性中提供了自动阶段指令,则会将其添加到可在仪表板上选择的可发送选择器。
所有操作员界面组件的代码都在此处生成。
此外,将 OI 按钮链接到应该运行的指令的代码也在此处生成。
Commands to be run on a subsystem when no other commands are running are defined here.
通过仪表板运行的命令在此处指令。